危险来袭怎么办?别急,全向移动侦察机器人轻松搞定
技术背景
对于进行安全监测这种行动来说 , 其实一般的安全监测行动都会受到许多方面的制约 , 比如说环境的限制或者是技术的革新等等 , 这些特殊的影响条件都会通过各方面的影响造成相当程度的变化与侦测条件 , 具体发生的使用现状大致都会是与社会生产变化产生一定的影响 , 主要效率差距较大 。
【危险来袭怎么办?别急,全向移动侦察机器人轻松搞定】而如果是真实狭窄难以判断具体方位的移动效果的话 , 此类功能整体意味性相比于周围的变化来说要显得更加复杂 , 且一般环境下产生的有效状态都会因为不同的真实效果而产生集体变化 。使用全向移动侦查机器人来进行侦测 , 相对侦测起来死角条例会更少 , 检测能力会得到有效发挥 。
现有技术
当前已知条件下存在的全向移动侦察机器人效果十分特殊 , 基本上所含有的功能和已知条件状况大都有所区分 , 实际意义差距很大 。
有的侦查机器人并没有办法实现全向的快速移动 , 自身移动速度有限 , 且此等上限也绝对称不上是快 , 对于不同呢场景当中也会导致移动速度受到影响 , 耽误一些移动时间 , 导致行动也侧面受到影响效果 。
有的侦查机器人并没有采用麦克纳姆轮 , 所以全向移动的水平不够 , 转向灵活这一个点也体现不出来 , 真实的状态是展现出的移动水平比较滞塞 。所以真实效果其实比较够呛 , 没办法展现出独属于此类机器人的灵活性 。
有的侦查机器人防撞水平不高 , 在自行移动检测的过程当中如果被其他物品移动撞倒 , 或者是自身因为操作失控而撞上墙壁 , 在这种状态下防撞水平不高很可能会导致此类机器人出现故障损耗 , 无法继续完成任务 。
技术介绍
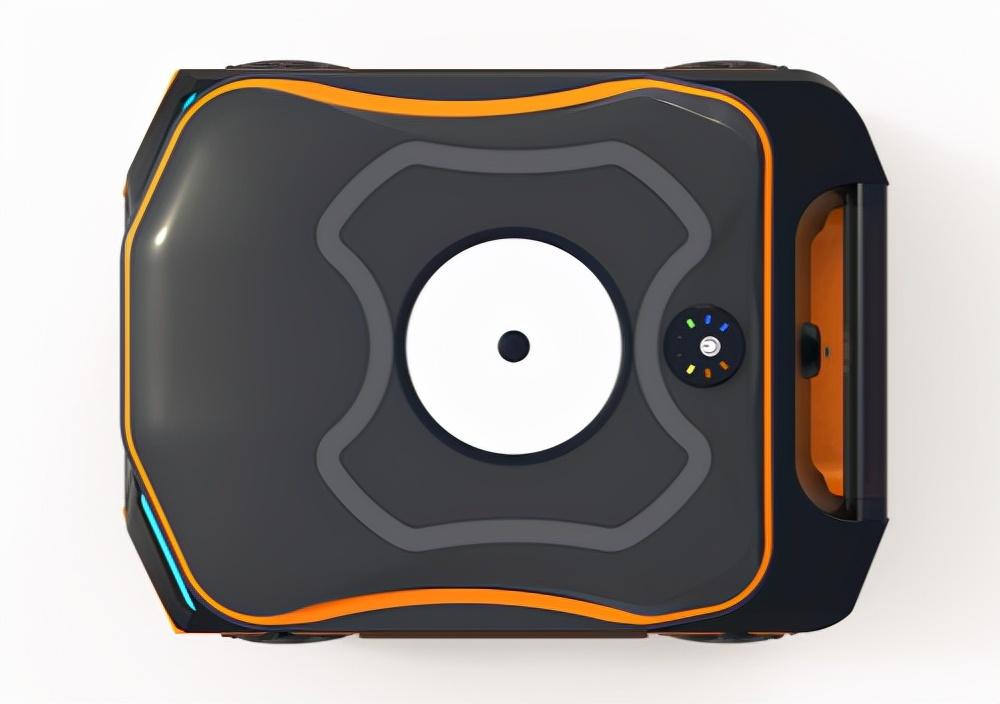
RXR-C360D-2全向机器人 , 是一款体积小巧 , 外形扁平的小型检查机器人 , 主要用于狭窄、低矮空间的检查作业 , 亦可扩展加载各种传感器模块对目标区域进行探测 。机器人驱动轮采用了麦克纳姆轮结构设计 , 具备任意方向角度的平移运动能力 , 运动灵活 , 操作方便 。机器人加载了行车、检查双路视频系统 , 并具备实时图传功能 。同时前向的避障雷达 , 可使机器人避免撞上障碍物 , 提高使用安全性;控制器小巧轻便 , 集成度高 , 具备机器人控制、图像采集功能 。是目前市场上少有的全功能专业狭窄、低矮空间检查机器人 。
技术特点
1.快速全向移动
本产品采用麦克纳姆轮 , 可全向移动 , 转向灵活 , 操作方便 , 最大运动速速可达1.5m/s , 可快速抵达侦查区域 , 节约时间 。
2.狭小空间侦查
本产品尺寸较小 , 可以对人员不便观察的狭小、低矮区域进行侦查 。车体的上视镜头可以对车底盘进行检查 。车体前置避障雷达 , 可躲避障碍物 。
3.搜索救援
本产品可以对危险区域和人员不便进入的区域快速抵达 , 快速搜索 。车体的前后夜视摄像头可以使产品在夜间工作 , 提高搜索救援效率 。
4.便携防撞
全向机器人前向配备了摄像头和避障雷达 , 后向配备了摄像头和防撞装置 , 给产品带来了更高的安全性 。
应用情况

文章图片
文章图片

文章图片
文章图片
文章图片
文章图片
- 震撼大片来袭!“自拍杆”过于优秀…
- 包头人速抢!一大波“2022鹿城年货节”消费券来袭
- 猛鬼宿舍|猛鬼宿舍提示出错怎么办(猛鬼宿舍报错解决方法)
- 复苏的魔女重复角色怎么办(复苏的魔女重复角色用途介绍)
- 猛鬼宿舍门没了怎么办(游戏门破了解决方法)
- 黎明觉醒没水了怎么办(黎明觉醒装水方法一览)
- 美团商家拒绝了退款申请怎么办(美团商家拒绝退款申请解决办法说明)
- 香肠派对提示使用外设怎么办(香肠派对被判定使用外设问题详解)
- 猛鬼宿舍门没了怎么办(猛鬼宿舍门破了玩法介绍)
- 名下拥有多个手机号,健康宝遇弹窗怎么办?