像金枪鱼一样动态调节尾巴弹性:仿生机器人新发现,「机器金枪鱼」登上Science子刊
弗吉尼亚大学教授 Dan Quinn 和博士后钟强结合生物力学、流体力学和机器人学揭秘了如何利用动态弹性调节实现高性能游动 , 研究已登上最新一期《Science Robotics》 。
文章图片
文章图片
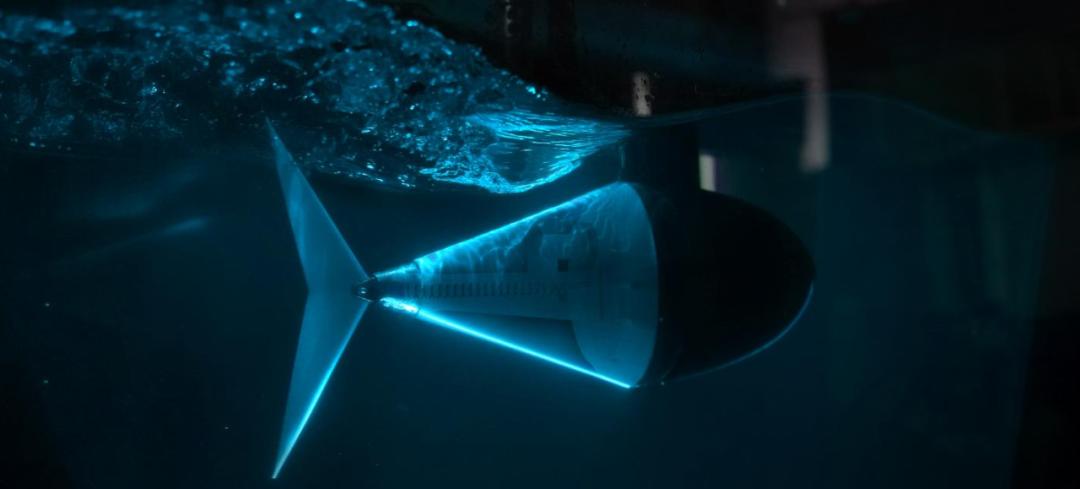
机器金枪鱼尾部内置的弹性调节执行器能根据当前游动速度实时调节尾部弹性 。来源:Qiang Zhong(钟强) , Daniel Quinn /University of Virginia.
传统的螺旋桨驱动水下潜航器系统能在特定的设计巡航速度下保持较高的推进效率 , 但通常无法同时在高速和低速下保持高推进效率 。相对比之下 , 自然界的鱼类却能够在较大的速度范围内保持极高的游动效率 。而其中的关键因素便是鱼类那由肌肉构成的柔性身体 。受此启发 , 过去的研究人员开发了一些模仿鱼类的柔性机器鱼系统 , 如通过柔性液压驱动器、柔性仿生肌腱来模仿鱼体的解剖学结构 。然而 , 如何选择合适的弹性设计却是一大难题 。
不恰当的弹性结构设计会降低机器鱼的游动性能 , 其推进速度和效率也往往远不及生物学原型 。机器鱼尾部的刚度就如同自行车上的换挡齿轮 。固定弹性(刚度)设计的机器鱼就像是一台不能变速的自行车 , 仅仅一小段山路就足以令人精疲力竭 。但通过变速机构 , 我们则可以针对不同骑行路况选择最优挡位来节省体力 。全面且细致地研究尾部弹性对于游动性能的影响及其背后的流体力学机理 , 对于未来高性能仿生水下潜航器的开发至关重要 。
在最新一期《Science Robotics》的文章中 , 来自弗吉尼亚大学的教授 Dan Quinn 和博士后钟强结合生物力学、流体力学和机器人学揭秘了如何利用动态弹性调节实现高性能游动 。该研究介绍了一种具有动态尾部弹性调节功能的机器金枪鱼平台 , 能够根据当前的游动速度通过可编程的人造肌腱自动调节尾巴刚度 。通过动态弹性调节 , 该机器金枪鱼在实验中实现了更大的游动速度调节范围的同时实现了接近 100% 的推进效率增长 。这种动态弹性调节方法解决了目前柔性仿生机器鱼的性能瓶颈 , 并为将来开发高频率、高速的大型仿生水下潜航系统提供了新的解决方案 。

文章图片
文章图片
论文地址:https://robotics.sciencemag.org/content/6/57/eabe4088
材料硬度难以把控?
【像金枪鱼一样动态调节尾巴弹性:仿生机器人新发现,「机器金枪鱼」登上Science子刊】不如学鱼类自行调节尾部「硬度」
生物学研究认为 , 鱼类在通过自身肌肉驱动尾部摆动的同时 , 部分肌肉也被应用于身体弹性调节以实现高推进效率 。金枪鱼通过肌肉控制贯穿全身的肌腱系统来调节尾巴弹性 。但由于其结构特性 , 我们没有办法直接在活的金枪鱼体上测试动态弹性调节对于游动性能的影响 。
为了探索金枪鱼在变速游动中的弹性调节机理以及其背后的流体力学原理 , 我们以金枪鱼解剖结构为原型并将其建模 , 基于此设计了机器金枪鱼平台 。不同于此前的仿生学研究偏向于模仿鱼体结构及游动姿态 , 我们刻意地减少了鱼体结构复杂度以专注于研究尾部弹性对于游动性能的影响 。除此之外 , 我们还配套开发了高频率驱动装置来驱动机器金枪鱼 , 以达到类似真实金枪鱼的游动频率(7 赫兹左右) 。

文章图片
文章图片
- 白夜极光巨像氛围值是什么(白夜极光巨像氛围值作用一览)
- 不一样修仙2npc好感怎么提升(不一样修仙2npc好感度攻略)
- 不一样修仙2天赋有哪些(不一样修仙2天赋大全)
- 不一样修仙2新手开局有哪些技巧(不一样修仙2萌新开荒注意事项)
- 不一样修仙2灵兽怎么获得(不一样修仙2灵兽抓捕攻略)
- ????灵历十八年河神雕像怎么玩(灵历十八年河神雕像破解方法分享)
- 英雄联盟2021MSI季RNG冠军头像怎么领(英雄联盟2021RNG冠军头像领取方法分享)
- 哈利波特魔法觉醒石像棋子挑战怎么过(哈利波特魔法觉醒石像棋子挑战完成方式一览)
- 学园偶像季群星闪耀百万玩家纪念奖励在哪领(学园偶像季群星闪耀纪念奖励领取方式介绍)
- 偶像大师三峰结华|《偶像大师》三峰结华声优更换(成海瑠奈出轨风波后隐退被顶替)