培育强人工智能的「ImageNet」:上海交大卢策吾组提出铰接物体知识库 AKB-48( 三 )
物理属性
真实的物体存在于物理世界中 , 通常具有物理属性 , 这对于精确仿真、真实世界中的控制和铰接物体的交互是很重要的 。因此 , 我们为模型存储物理属性的标注 , 包括每个部位的质量、惯量、材料和表面摩擦力 。
3
物体选择:真实世界扫描 vs. CAD 建模
本文从标注的准确性、时间和金钱成本两个方面对比真实世界扫描和 CAD 建模 。
标注准确性
根据 ArtiKG 的内容 , 我们可以看到 , 相较于 CAD 建模 , 从真实世界中扫描的物体具有很多优势(例如 , 外观和物理性质) 。但不可否认的是 , CAD 模型可以模拟内部结构 , 而扫描技术更多地关注物体表面 。幸运的是 , 大多数日常用品都可以拆卸 , 所以扫描技术可以很好地处理它们 。
时间与金钱成本
在研究新的类别或运动学结构时 , ShapeNet 类型的模型收集范式局限于构建手工 CAD 模型所需的大量时间和金钱成本 。另一方面 , 日常生活中 , 许多铰接物体价格偏移 , 可以被外行人扫描 。就 CAD 而言 , 淘宝上的外包服务价格如下表所示(单位:美元) 。
4
快速铰接知识建模(FArM)
模型获取设备
为了高效收集现实世界的铰接模型 , 我们设置了一个如下图所示的记录系统:

文章图片
文章图片
图注:(1)用于多尺度物体的旋转转台(2)是一个跟踪标记(3)吸光项(4)升降支架(5)Shining 3D 扫描仪(6-8)用于捕获多视图物体数据的英特尔 RealSenseL515相机 。
关节建模
我们为标注开发了一个铰接物体建模的三维 GUI 。建模过程包含三个部分:物体对齐、部位分割、关节标注(详情请参阅原文) 。
物理标注
现实世界中的铰接物体存在于物理世界中 , 具有物理属性 。为了使 AKB-48 可以被用于现实世界的机器人控制和交互任务 , 我们还为铰接物体的每个部分标注了以下物理属性:各部位质量、各部位惯性力矩、各部位材料和摩擦力 。
数据集分析
物体类别
在构建 AKB-48 数据集的过程中 , 我们考虑了以下要求:(1)通用性 。AKB-48 能够涵盖日常生活中常见场景中的大部分铰接物类别 。(2)多样性 。每个类别中的物体有各种各样的形状 , 形变能力、纹理和运动结构 。(3)用例 。所选物体应该包含各种使用上的功能 。此外 , 完成控制性能的能力是需要优先考虑的 。
统计信息
文章图片
文章图片
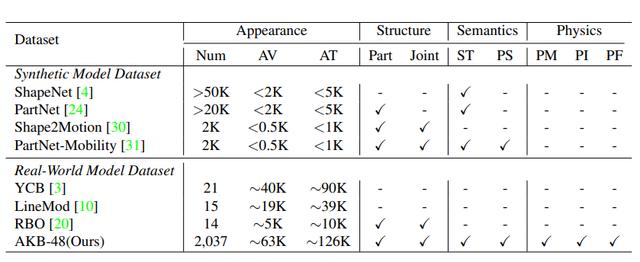
图注:AKB-48 与其它流行的模型数据集对比 。
我们的 AKB-48 数据集在 ArtiKG 中提供了四种丰富的标注信息:外观、结构、语义和物理属性 。AV:平均顶点数 。AT:三角形的平均数目 。ST:语义分类 。PS:各部位语义标签 。PM:各部位质量 。PI:各部位惯性力矩 。PF:各部位的摩擦力 。
AKBNet
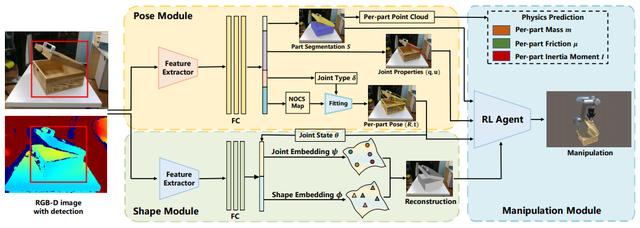
AKBNet 是一个用于 C-VAM 任务的集成架构 。AKBNet 的输入是单张带有检测到的二维边界框的 RGB-D 图像 。AKBNet 中构建了三个子模块 , 旨在估计各部位的 6D 姿态 , 重构铰接物体的完整几何形状 , 并根据感知信息推理交互策略 。
文章图片
文章图片
图注:AKBNet 架构示意图 。
姿态模块
给定带有二维边界框的图像 , 我们可以获取部分点云 P 。我们首先通过 Pointnet++提取点云特征 , 然后建立了用于预测逐点分割 S 和部位级归一化物体坐标空间(NOCS)图的两个分支 。为了解决为止运动结构和关节类型的问题 , 我们在特征提取器上引入了三个分支 , 根据相应的部位对关节类型分类 , 并预测关节的属性(位置 , 轴) 。最后 , 我们通过带有运动约束的姿态优化算法恢复出每个刚性部位的 6D 姿态 。
- 苹果准备最强ipadpro将搭载m2处理器
- 为什么iPhone还是最强录像手机?实测对比给你答案
- iphone13promax全面改造成功,华强北师傅亲自改造
- 魔兽世界9.2最强职业推荐(9.2新手玩家适合的职业分享)
- “芯”能再进一步 realme Book增强版轻薄本强在哪?
- 技嘉发布史上最强迷你机:0.8升好身材 貌似啥也不缺了
- 英国出台开车玩手机最强禁令!8千元扣6分够狠
- 元宇宙新鲜事广州天河宣布入局“元宇宙” 北、上、深为全国元宇宙企业分布前三强
- 全球独角兽esta新增一家人工智能公司——cresta
- 为防疫加把“科技锁”!强生62580平台上线新功能,助力疫情防控更精准高效