机器人的终极形态,不是「擎天柱」而是「毒液」( 三 )
SquishyRobotics–灾难救援
一般来说 , 灾后最初的几个小时对于搜索和救援是至关重要的 。然而 , 救援人员到达现场往往需要时间 。现场状况还常常限制了他们在清理现场之前进行有效搜索的能力 。软机器人具有灵活的结构 , 能够使救援人员到达废墟下 , 而且 , 使用无人机很容易部署机器人 。

文章图片
文章图片
SquishyRobotics是一家总部位于美国的初创公司 , 致力于开发用于灾难救援的移动感应机器人 。他们的机器人可以快速部署 , 即使是成群的机器人 , 在与救援人员互动方面具有高度的协作性 。他们顺从和形状变化的设计使他们能够到达人类第一反应者无法到达的空间 。这些机器人装备有传感器 , 可以传输视觉、音频、化学和生物信息 。
Somnox–机器人辅助医疗
在机器人辅助的医疗保健中 , 机器人引导病人完成重复性任务 。这有助于伤后的康复 , 并鼓励特定的行为 , 如成瘾恢复或改善治疗的依从性 。软机器人技术将刚性驱动器或外骨骼与模仿人类行为的柔软部件结合起来 , 并转换机器人辅助护理 。

文章图片
文章图片
Somnox是一家荷兰创业公司 , 提供软机器人技术创新解决方案来提高睡眠质量 。他们的睡眠机器人帮助患有睡眠昼夜节律障碍的人更快更长时间入睡 。它模拟呼吸模式 , 播放放松的声音 , 并且安慰睡眠者作为上瘾的安眠药的替代品 。如何制造和驱动软体机器人?
正是软体机器人的应用和研发 , 带动了材料、致动技术的进展 , 这才推动了产业应用 。
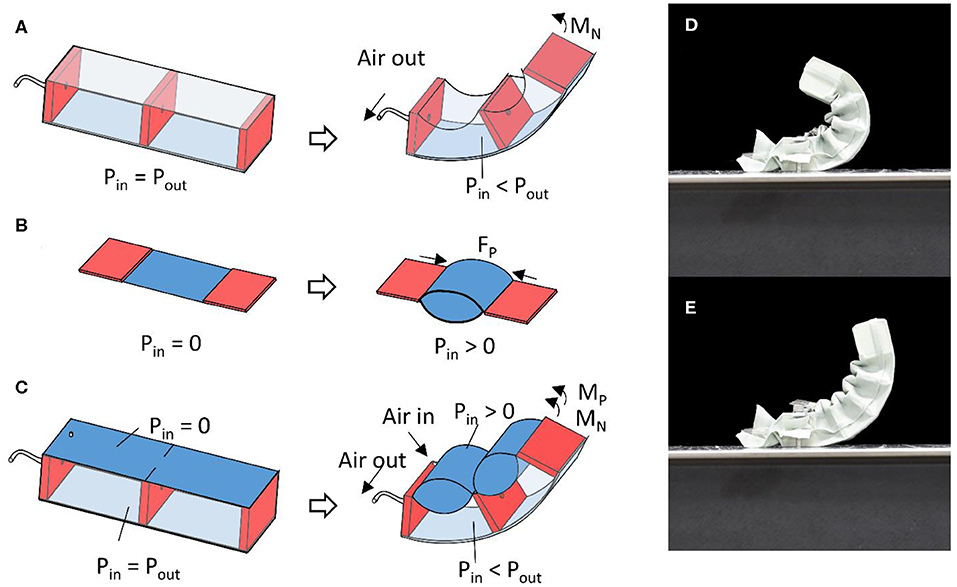
软体机器人当前有几种致动模式 , 如燃烧驱动致动、光敏致动和气动网络致动 。其中 , 气动网络致动模式(PneumaticNetworksactuators,PneuNets)是目前大多数软体机器人采用的驱动模式 。
驱动器由软材料 , 弹性体组成 , 在其中加压流体可以在一系列通道和腔室内流动 。当这些腔室受压时 , 受限的流体会从材料内部产生应力 , 导致材料产生应变 , 变形 , 并使致动器运动 。通过调节嵌入式腔室的几何形状及其壁的材料属性 , 人们可以控制此运动的性质 。通常 , 流体弹性体机器人的每个部分都会弯曲 , 而这种弯曲是由于材料应变引起的 。
如果机器人由单个均质的弹性体组成 , 则大多数膨胀将发生在最薄的结构上 , 因此机器人的运动将取决于微流体回路的几何形状 。但是 , 具有不同弹性行为的材料也可以用于对致动器行为的进一步控制 。
文章图片
文章图片
致动器在受压时弯曲变形|成均馆大学机械工程学院软机器人实验室
为了制造软体机器人的本体部分 , 最常用的制造工艺是软光刻成型 , 它依赖于在通过软光刻或3D打印获得的模具中铸造弹性体 。这种制造过程通常包括三个步骤:软体机器人由两部分组成:外层 , 包含所需通道结构的模型 , 以及约束层 , 呈现出驱动所需的不可扩展特性(由于不同的刚度) 。每层通过在每个模具中浇注硅橡胶而成型 , 并固化 。然后 , 将两个固化层从它们的模具中取出 , 使用一层薄薄的未固化弹性体作为胶水连接 , 然后固化在一起 。最后 , 一旦固化完成 , 最终的致动器就会从模具中取出 。
显然 , 有一些软体机器人更复杂 , 创造它们需要更多工序 , 但从广义上讲 , 制造过程也类似 。
- 我国科学家首次将量子机器学习应用到数字地形领域
- 【爱成都·迎大运】“蓉宝机器人”科技赋能大运会
- 腾讯会议怎么关闭别人的声音(腾讯会议关闭别人的声音方法分享)
- “机器翻译助力医疗翻译高质量发展”研讨会举行
- 又一家手术机器人公司即将上市,精锋医疗上市在即
- 微信群机器人怎么弄出来(QQ添加群机器人步骤)
- #亚运加载中#场馆数字孪生、机器人送餐...智能亚运革新赛事体验
- 哪些打工人会被机器人替代?最新算法给你答案
- 2022年投资额度已超百亿工业富联完成对思灵机器人独家战略投资
- 高科技来袭!河南理工大学举行机器人大赛