机器人的终极形态,不是「擎天柱」而是「毒液」
HyperTech是一个全球前沿视野的编译栏目 , 我们筛选近期科技领域的评论文章 , 进行信息整合并提供所有原文链接 。
提到机器人 , 你首先想到的是什么?大概是这样的:
文章图片
文章图片
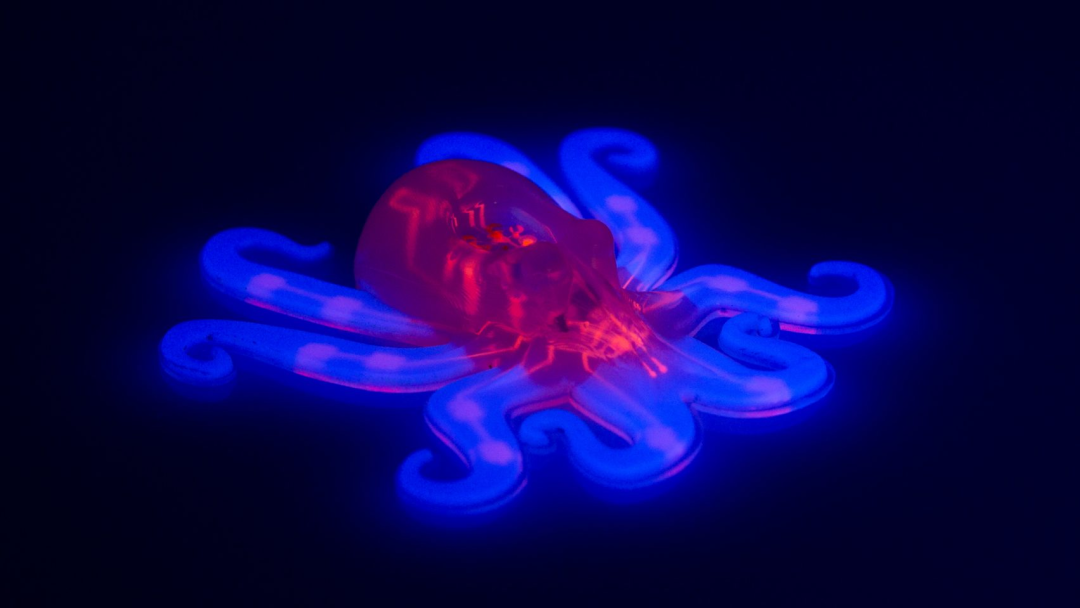
这一滩「史莱姆」来自上个月AdvancedFunctionalMaterials杂志上发表的一篇论文 , 是香港中文大学张立教授团队和哈尔滨工业大学谢晖教授团队的最新合作研究成果 。
它是一个酷似「毒液」的磁性黏液机器人 , 由强钕磁铁、硼砂和聚乙烯醇等材料混合制成的 , 基于非牛顿流体的磁驱动 。
这种软体机器人(Softrobotics)具有很好的变形能力和环境适应性 , 也可以通过卷曲行为来抓取和包裹物体 , 在临床医疗领域中 , 特别是微创手术、靶向药物输送等操作上有所应用 。
实际上 , 根据国际机器人协会曾调查的数据 , 全球工业界只解决了3%~4%的规则与刚性物品的自动化生产搬运问题 , 剩余96%左右的柔性异形、易损物品仍只能使用人工上下料 。
这意味着软体机器人领域的发展潜力很大 , 2020年软体机器人市值约10.5亿美元 , 预计到2026年将达到63.7亿美元 , 期间复合年增长率为35.17% 。
目前软体机器人仍处于早期阶段 , 但与传统机器人相比 , 软体机器人具有多种优势 , 能够在传统刚体机器人之外 , 帮助人类做更多的事 。
以柔克刚 , 软体机器人了解一下
【机器人的终极形态,不是「擎天柱」而是「毒液」】软体机器人技术是机器人技术的子集 , 与刚体机器人相比 , 它是和有机生命体的物理特征更相似的技术 。专家将软体机器人技术描述为仿生学的一种形式 , 其中机器人技术传统的线性和有些生硬的方面被模仿人类和动植物生命更复杂的模型所取代 。
文章图片
文章图片
哈佛大学的研究人员设计的Octobot
机器人一般由机械本体、驱动系统、控制系统和感知系统组成 , 软体机器人也同样 。它的本体部分利用柔软材料制作 , 例如流体、凝胶和弹性体 , 其能够与环境材料相匹配 。顺应性匹配的原则是指相互接触的材料应具有相似的机械刚度 , 以便均匀地分布内部载荷并 , 最大限度地减少界面应力集中 。
但是 , 该原理不适用于刚性机器人(E=10^9Pa)与软质材料(E=10^2~10^6Pa)相互作用 , 这会导致损坏或机械固定(其中E是杨氏模量 , 它可以衡量固体材料的刚度) 。很多脆弱的「环境材料」与软质材料的相互作用被广泛传播 , 比如天然皮肤 , 肌肉组织 , 脆弱的内部器官 , 还有生物 , 生物功能的人工复制等……
由于机械顺应性的显著失配 , 很容易得出一个结论:刚性机器人不适合人类亲密互动 , 否则会造成危险 。因此 , 需要一种与自然界中存在的材料和生物的弹性及流变特性相匹配的机器人 , 而这正是软体机器人可以提供解决方案的地方 。
文章图片
文章图片
软体机器人与经典机器人的比较|elveflow
然而设计软体机器人时 , 传统用金属制造机器人的成熟方法就无法适用 , 需要从原理到结构设计到驱动、控制、传感都采用全新的模式 。这也是软体机器人面临的一大问题 。软体机器人的用武之地
因为软体机器人是由符合生物物质(如人类皮肤和组织)的材料组成的 , 所以它们在机械上具有生物相容性 , 能够实现栩栩如生的功能 。这些材料还可以改变自身形状和弹性硬度 , 不仅重量轻 , 而且足够舒适、柔软以防止受伤 , 适合与人亲密接触 。
- 我国科学家首次将量子机器学习应用到数字地形领域
- 【爱成都·迎大运】“蓉宝机器人”科技赋能大运会
- 腾讯会议怎么关闭别人的声音(腾讯会议关闭别人的声音方法分享)
- “机器翻译助力医疗翻译高质量发展”研讨会举行
- 又一家手术机器人公司即将上市,精锋医疗上市在即
- 微信群机器人怎么弄出来(QQ添加群机器人步骤)
- #亚运加载中#场馆数字孪生、机器人送餐...智能亚运革新赛事体验
- 哪些打工人会被机器人替代?最新算法给你答案
- 2022年投资额度已超百亿工业富联完成对思灵机器人独家战略投资
- 高科技来袭!河南理工大学举行机器人大赛