自动驾驶的量产成本必须降下来

文章图片
文章图片
易航智能创始人兼CEO陈禹行(图片来源:易航智能)
自动驾驶攀上智能化的风口已有数年的时间 , 这条赛道上由于近两年大量汽车电子厂商的涌入而显得有些拥挤 。一部分玩家急于在资本市场上有所动作 , 仅仅在做出Demo之后就宣布即将实现量产 。对此 , 易航智能的创始人兼CEO陈禹行给出了他的观点 , 自动驾驶Demo就像冰山露出水面的那10% , 而自动驾驶量产要解决剩下90%的问题 , “昂贵设备的堆砌与量产背道而驰 , 真正的量产成本一定要降下来 。”而由此带来精度受影响的问题必须通过术手段来解决 , 这才是真正的量产 。
【自动驾驶的量产成本必须降下来】场景与分级 , 哪一个重要?
在自动驾驶的技术方向上有着分级与场景两条路线 , 前者以传统的L0至L5将系统安全性进行分级 , 优点在于清晰明了 , 但除了L5的全场景无人驾驶之外 , 其余几个级别都没有对场景做明确界定 。
因此就出现将场景极力压缩 , 然后将此场景中的自动驾驶级别推到L3或L4级别 。但是由于场景过小对于终端用户毫无意义 。例如在高速公路上仅有一小部分路段可以实现相关功能 , 还需要车辆时速不超过60公里且在能够看到隔离带的最内侧车道行驶 。
陈禹行希望能够将场景逐步放开 , 在尽可能的场景中让自动驾驶发挥作用 , 这样才能解决终端用户的痛点 。以特斯拉为例 , 其智能辅助驾驶功能的场景从最初高速公路上的单一车道变成整体高速公路的NOA , 然后逐步延伸至城市场景 。这意味着用户在几乎所有场景下都可以使用智能辅助驾驶 , 只有在个别情况下需要手动接管 , 为其在使用中提供了完整的体验 。
以易航智能采用的与当下很多主流企业相同的以场景为核心的自动驾驶量产路径来看 , 首先以低成本的ADAS实现一条车道内辅助驾驶 , 这一方案已经在理想的量产车型上落地应用;然后用NOA方案在高速上实现点对点的辅助驾驶 , 在泊车功能上也升级到记忆泊车与代客泊车的方案 , 江铃雷诺、上汽大通、威马等使用了易航智能的基于TDA4(TI推出的新一代面向高级别自动驾驶芯片)的NOA行泊一体方案;当城区内所有场景实现点对点打通时 , FSD的全场景解决方案便得以实现 , 一个正在进行的项目预计于2022年底便会完成量产 。
在如何实现最终的无人驾驶目标问题上 , 多数方案集中于渐进式路线与跨越式路线 , 前者更加偏重于场景 , 目前来看也更加受到主流车企与自动驾驶研发企业的青睐 , 因为围绕着场景比围绕着分级能创造更多价值 。以上下班通勤为例 , 整个车程要两个小时 , 路上途经的一个环境极为复杂的菜市场 , 大约需要5分钟通过 , 做场景的思路就是先实现95%的时间自动驾驶 , 剩下5%的cornercase由人来监控 , 后续通过升级迭代解决 。这套方案在分级上不是L4 , 但它切切实实为用户创造了价值 。
文章图片
文章图片
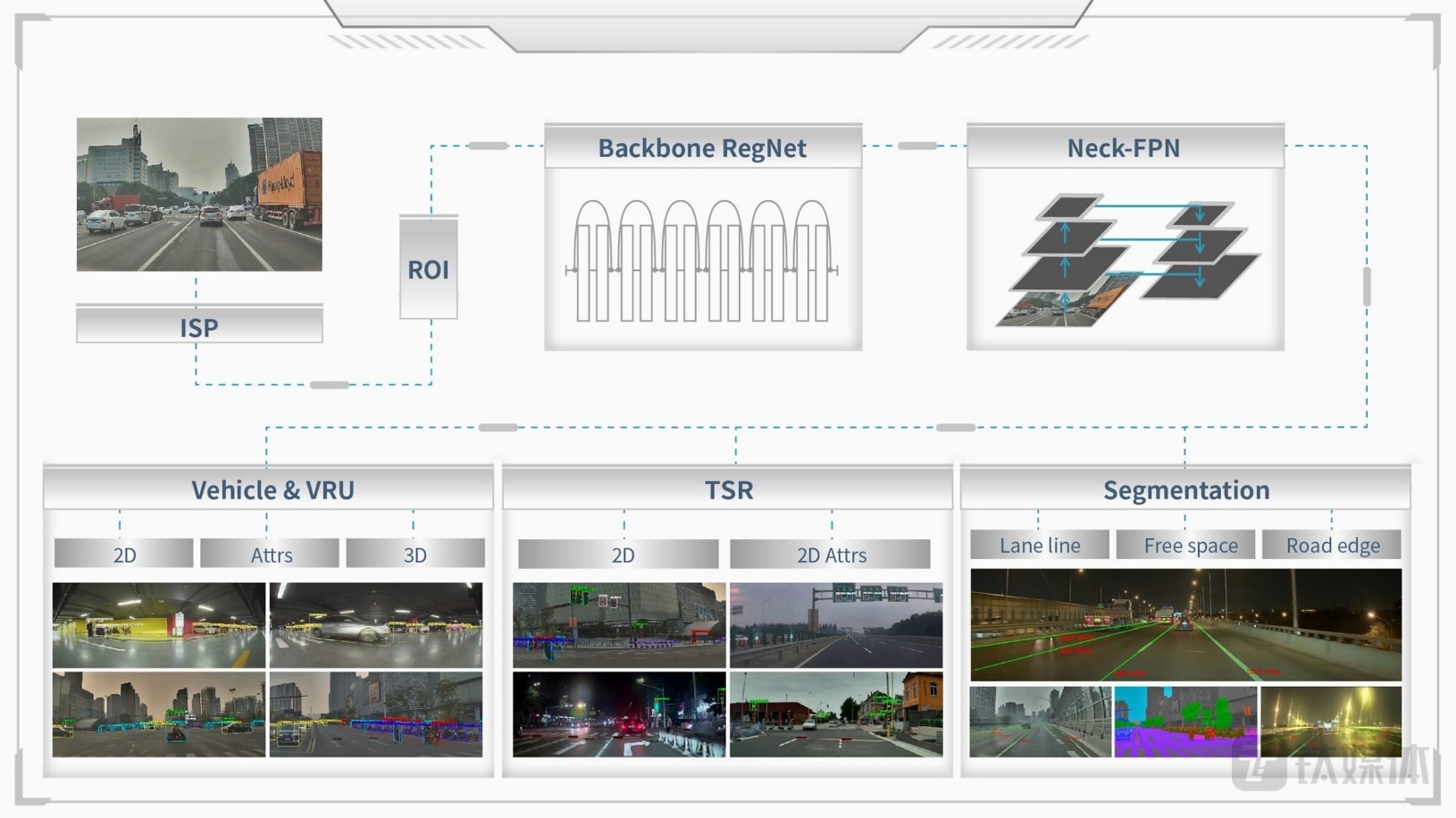
易航智能拓扑图(图片来源:易航智能)
为了实现量产 , 成本必须降下来
关于量产 , 陈禹行坚持以此为导向做全栈自研 。他表示自动驾驶的demo展示的是最完美的状态 , 而量产关注的是产品在极端情况下的状态 , 两者表现出的能力截然不同 。并且量产后的车型究竟会被卖到哪里 , 究竟是什么样的驾驶者有怎样的驾驶习惯 , 都是未知的因素 。而中国地域广阔 , 不同城市的驾驶者或许会有不同的驾驶习惯 , 加上在所难免的人为误操作 , 都为目标是量产的自动驾驶解决方案提出了难题 。因此 , 只有拥有全栈自研的能力 , 把整个技术链条都趟一遍 , 才能快速界定问题症结 , 加速方案量产 。
- IE浏览器宣布退役 国产浏览器的机会来了
- 苹果汽车项目再次失去一位高管 还是曾经的特斯拉负责人
- 中兴的屏下摄像头又进化了,但我并不建议你买它
- 学不会Excel的我的一生
- 软件开发的“两全”其美:全自动 全栈式
- 快狗打车高额亏损的背后,是不断烧钱补贴用户
- 博主花万元买的索尼Xperia 1 IV到手只有裸机
- 支付宝蚂蚁庄园2022年5月27日答案更新(甜点西米露里的西米,制作它的原料是怎么来的?5月27日答案分享)
- 淘宝人生的虚拟代言人叫什么(虚拟代言人名字答案分享)
- 农场人的“抠门”