清华大学机械系研发微小型管道机器人 实现亚厘米级管道高效探测
IT之家5月29日消息 , 据清华大学官网消息 , 近日 , 清华大学机械系现代机构学与机器人化装备实验室研发了一种可在亚厘米级管道中高效运动的管道探测机器人 。
【清华大学机械系研发微小型管道机器人 实现亚厘米级管道高效探测】在航空发动机和炼油机等复杂系统中 , 有大量用于输送水、气体和油的管道 。通常 , 这些管道具有各种直径、变化的曲率 , 并覆盖较长的距离 。为确保它们处于良好的工作状态 , 需要定期从外部和内部进行管道检修 。目前已开发的各种管道巡检机器人包括轮式、腿足式、履带式等运动机构 , 多采用电磁电机驱动 , 适用于大口径管道的检测 。当涉及到直径小于一厘米的微细管道时 , 机器人的尺寸很难按比例缩小 。
文章图片
文章图片
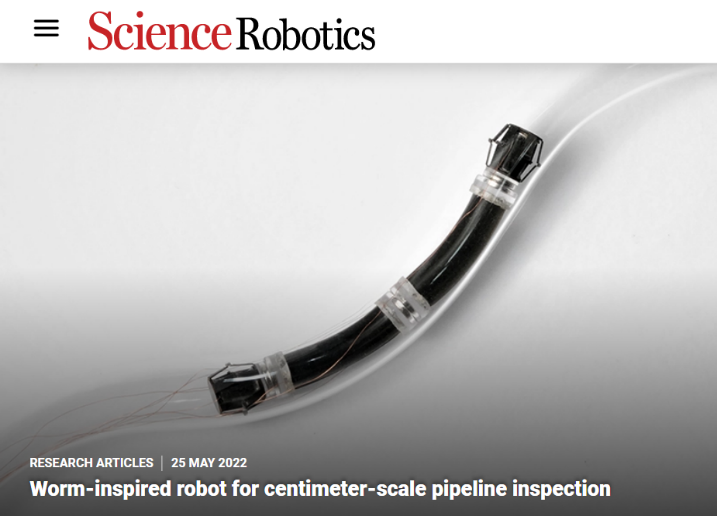
微型管道机器人在弯曲管道中行进
本项工作提出了一种智能材料驱动的微型管道检测机器人(重量2.2克 , 长度47毫米 , 直径该成果以“用于亚厘米级管状环境导航的管道检测机器人”(Apipelineinspectionrobotfornavigatingtubularenvironmentsinthesub-centimeterscale)为题发表在《科学?机器人》(ScienceRobotics)上 。

文章图片
文章图片
管道机器人在多介质、多材质、变管径的复杂管道中行进和探测
论文第一作者为清华大学机械工程系博士后汤超 , 通讯作者为机械工程系副教授赵慧婵 , 其他作者包括机械工程系教授刘辛军和2021级博士生杜伯源、2018级博士生姜淞文、2019级硕士生邵琦、2019级博士生东旭光 。该团队多年来一直专注于机器人领域相关研究 。本项工作受到了国家自然科学基金青年基金、面上项目以及共融机器人重大研究计划等项目的支持 。
- redmi正在研发平板新品,不止小米平板获益
- 中科院团队研发绿色低碳成套新技术实现十万吨级工业装置运行
- C919国产大飞机用上美法合研发动机 中科院院士:这是必要的
- OPPO:Reno系列用户超4000万 加强自研芯片研发
- CPU功耗冲上400W 风冷不够用:Intel投资47亿研发
- 苹果mr头显研发进入尾声,将于2023年发货
- 腾讯3年投入1366亿研发费:操作系统、芯片等已有完整自研体
- 成本低且易制造!德国科学家研发出最简单薄膜照明设备
- 硬核!山钢奋力突破产品研发“卡脖子”技术
- 揭秘!北斗卫星导航系统的“心脏”是这样研发出来的