国际先进水平!“揭榜挂帅”力促矿用无人驾驶技术“突围”
本文转自:新华网
“自动避让行人、绕障碍物行驶、与前车保持安全距离、处置复杂突发路况......‘空荡荡’的驾驶室内 , 方向盘自己转 , 油门刹车自己踩 。”这一幕是发生在榆北煤业曹家滩煤矿无人驾驶测试现场 。这些过去需要人小心驾驶的“动作” , 现在由中国煤科常州研究院研发的矿用无人驾驶系统就能自动控制完成 。
技术张榜 项目“立”起来
近年来 , 无人驾驶技术在全球多地不断取得新的突破 。相比之下 , 由于煤矿井下受无卫星定位信号、交叉路口视野受限、爆炸性环境、高粉尘、“长廊效应”明显等复杂因素影响 , 使得矿用无人驾驶车的技术研发要求更高 , 实施难度更大 。
为此 , 中国煤科常州研究院在公司内部发布技术榜单 , 悬榜招募团队攻克无人驾驶核心技术 。研发中心副主任周李兵同志认真剖析煤矿井下无人驾驶现状 , 多维度分析该项技术 , 经过团队成员商议 , 决定“揭榜” 。
成功“揭榜”后 , 他带领团队围绕既定目标任务 , 深入思考研究 , 制定详细的措施和方案 , 科学细致规划项目进度 。经过一年多的协同作战 , 终于突破了井下车联网与无人驾驶核心关键技术难题 , 实现了国内首个煤矿井下车联网和无人驾驶系统落地应用 。在曹家滩煤矿井下无人驾驶无轨胶轮车上 , 所有行驶数据均达到常态化运营要求 , 无人驾驶时车速最高可达22km/h 。截至当前 , 该矿井下无人驾驶车辆安全运行里程已超2000公里 , 项目成果经中国煤炭工业协会专家鉴定达到“国际先进水平” 。

文章图片
文章图片
精确定位 地图“动”起来
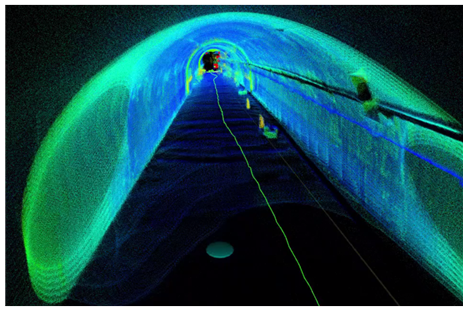
针对井下封闭环境无法使用地面自动驾驶常用的卫星导航技术问题 , 该团队研制了矿用智能路侧单元 , 配合自主开发的矿山语义级高精地图 , 加载基于 UWB 标识卡的“类卫星定位”导航系统 , 实现了井下高速移动车辆动态精准定位 , 让车辆在井下放心行驶与精准停靠 , 从此“不迷路” 。
智能感知 眼睛“亮”起来
智能感知系统相当于人的眼睛 , 负责感知周围的环境 。面对井下低照度、高粉尘等恶劣环境 , 该团队突破井下特殊工况环境及单类传感器感知能力的局限性 , 研制了16线激光雷达、毫米波雷达、超声波雷达、高清摄像头等全系列矿用本安型感知装备 , 开发了井下多传感器目标检测融合算法 , 提高感知系统准确度与环境适应能力 , 实现360度无死角感知 , 从此“看得更清” 。
文章图片
文章图片
5G赋能 车路“通”起来
“聪明”的车也需要“聪明”的路支撑 。该团队基于“5G+实时远程管控平台”研制的井下分布式车路协同边缘计算系统 , 构建了低时延、高带宽、高可靠性的蜂窝车联网大容量数据共享与交互通道 , 不仅解决了井下本安设备功耗限制与自动驾驶大算力高功耗之间的需求矛盾 , 更提升了车辆超视距与盲区的感知能力 , 让“聪明”的路支撑智能的车 。实现了车端、边缘侧的算力资源整合及分发 , 大大提升了算力资源的分配灵活性 , 也降低了系统成本 , 满足井下自动驾驶全景交互、车组调度、应急远程干预等功能 , 提高安全冗余和运输效率 , 从此“无人驾驶更安全” 。
【国际先进水平!“揭榜挂帅”力促矿用无人驾驶技术“突围”】中国煤科常州研究院将继续坚定贯彻落实集团公司“1245”总体发展思路 , 用好“揭榜挂帅”机制 , 进一步激发科研人员创新潜能 , 加快关键核心技术攻关 , 在“数字化”新赛道上奋力奔跑 , 为矿山整体无人化运营和智慧矿山建设贡献科技力量 。
- 王者荣耀国际服怎么下载(国际服安装包下载入口)
- “百科全书”开播,32届青岛国际啤酒节历史都在他脑子里
- 消博会快报 国际知名服务咨询机构安永:着眼“元宇宙”场景规划将是新零售发展的重要趋势
- 重庆国博中心运营服务能力获国际认可
- 高度国际集团乔迁北京国航世纪大厦
- 喜旺夺得国际金奖,中国企业品质管理再次震撼世界
- 俄罗斯计划2024年退出国际空间站计划;微信安装包11年膨胀575倍
- 聚焦第二届中国国际消费品博览会丨“山东好品”寻出海商机
- 品牌云集 第二届中国国际消费品博览会正式开馆
- 海旅免税联袂京东国际战略合作签约 促免税行业向数智化转型