中国科研团队研发磁驱动连续体微型机器人助力微创手术
文章图片
文章图片
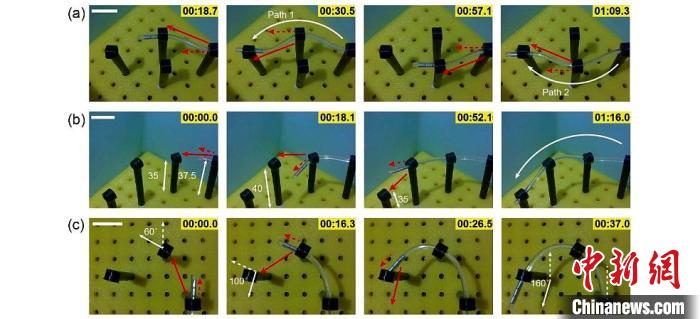
连续体机器人灵巧通过各种狭窄通道 。沈阳自动化所供图
中新网沈阳12月15日电(采访人员王景巍)中国科学院沈阳自动化研究所(简称“沈阳自动化所”)15日发布消息称 , 该所微纳米自动化课题组科研团队成功研发出一种磁控连续体微型机器人 , 实现了手术导管机器人在人体狭窄腔道内开展患病组织精准治疗的突破 。
当前 , 微创手术中用到的手术导管机器人可以帮助医生对病人狭小腔道内的组织结构进行精确微创干预治疗 。然而 , 传统的手术软镜导管由于机械拉线驱动方式的限制 , 很难在进一步缩小整体尺寸的同时保证其可控性 , 因此限制了机器人在人体内的应用范围 。微型化和智能化是手术导管机器人发展的趋势和面临的挑战 。
据沈阳自动化所工作人员介绍 , 该所微纳米自动化课题组科研团队研发的连续体机器人采用聚二甲基硅氧烷(PDMS)材料制备 , 在外磁场驱动控制下可以实现在管道内的灵活弯转和穿行等动作 。以肾内逆行手术为场景 , 科研团队论证了这款机器人在狭窄通道内的灵巧运动性能和控制能力 。较此前采用机械拉线的驱动模式 , 这款外磁场驱动的连续体机器人具有更加简单的结构和灵活的运动性能 , 同时机器人的直径进一步缩小到了仅有2毫米甚至可达到0.4毫米 , 达到此前最小机器人直径的七分之一 , 使其可面向人体更狭小腔道内组织结构进行灵活可控的微创治疗 , 比如应用与脑神经外科、眼内手术或血管内手术等 。
据悉 , 为了保障民众的生命健康 , 沈阳自动化所微纳米自动化课题组科研团队长期致力于微纳米机器人方面的研究 , 从毫米级、微米级到纳米级机器人开展了一系列研究 , 并与医疗手术应用紧密结合 , 针对临床应用中遇到的困难开展原始技术攻关 。磁控连续体微型机器人的研发工作为面向临床应用奠定了基础 , 将有望显著提升微创手术的智能化程度 。
据了解 , 机器人及人工智能领域知名期刊《先进智能系统》(Advanced Intelligent Systems)(2021年第3卷第10期)以封面文章形式刊登了这项成果 。(完)
【中国科研团队研发磁驱动连续体微型机器人助力微创手术】来源:中国新闻网
- 郎酒将拓宽红花郎品牌战略阵地 打造红花郎“中国节”IP
- 长安福特蒙迪欧在中国市场的“全球化”
- 2021年度中国互联网辟谣优秀作品即将发布
- 投票啦!第六届中国文旅IP大会“IP有光”评选全面启动
- 复旦研发智能冰上运动训练分析系统,助中国选手化身“冰雪精灵”
- 中国百年矿业学府与智能工业新势力的完美结合
- 2060碳中和,看壳牌怎么说
- 中国信息研究院:国内市场手机出货量3340.1万部,同比增长25.6%
- 中国再次领先全球,利用二氧化碳就能发电,颠覆140年发电方式
- 2021年这些中国CIO如何引领数字化转型?