意念控制操纵机器移动、拿取物体成为现实
在科幻电影《X战警》中 , ProfessorX能以意念控制人类 , 每当你看到这一场景时 , 是不是特别羡慕不已、连做梦都想拥有这样的超能力呢?

文章图片
文章图片
如今 , 也许机会来了——你可以先从用意念控制“机器人”开始 。
近日 ,来自洛桑联邦理工学院(EPFL)、得克萨斯大学奥斯汀分校(UT)的科学家团队 , 就开发了一种可以仅借助人类大脑发出的电信号就能控制机器人的强化学习系统 ——无需任何语音控制或触控功能 , 使用者只需要简单地“想一想” , 就可以操控机器人完成移动、拿取物体等任务 。
据论文描述 , 这项基于脑机接口的研究 , 目前主要针对瘫痪患者 , 可以让机器人更加准确、快捷地辅助瘫痪患者的正常生活 , 以提高他们身体的灵活性 。
相关研究论文以“Customizingskillsforassistiveroboticmanipulators,aninversereinforcementlearningapproachwitherror-relatedpotentials”为题 , 已发表在Nature子刊CommunicationsBiology上 。
文章图片
文章图片
意念控制的前提:规避障碍
多年来 , 科学家们致力于开发一种可以辅助患者控制身体的系统 , 以帮助瘫痪患者完成日常生活必需的活动 。
在某种意义上 , 智能机器人的出现可以帮助瘫痪患者恢复一定的身体灵活性 , 因为他们可以操作机器人来代替自己完成任务 。
然而 , 目前的辅助设备一部分仅限于通过摄像头等装置实现自动避障 , 控制权并非在瘫痪患者自己这边 。另一方面 , 即使是瘫痪患者掌握避障选择权 , 也都是基于语音或操作控制面板来满足需求 , 普适性并不高 。
为了解决这一问题 , 此次研究团队希望首先解决“机器人规避障碍”的问题 。因为患者们的所有日常活动都会涉及这一点 , 如果没有一个好的避障系统 , 对患者来说 , 机器人就没有了辅助意义 。
因此 , 研究人员从他们几年前开发出的机械臂着手 , 该机械臂可以来回移动 , 不断实时定位它面前的物体 , 并绕过移动路径上的障碍物 。大脑电信号与逆向强化学习
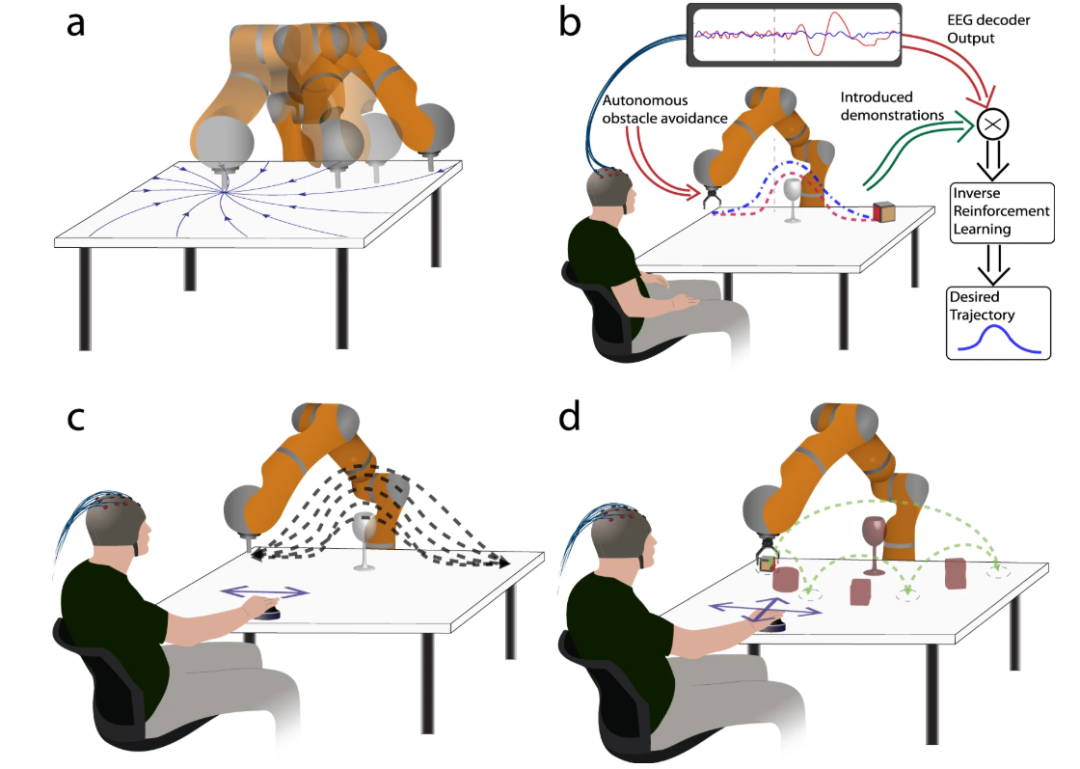
论文通讯作者之一、EPFL学习算法与系统实验室的负责人AudeBillard教授说:“在此次研究中 , 我们不仅对机器人进行了编程以避开障碍物 , 而且选择了一些其他更难的任务 , 例如在桌子上放一个装满水的杯子 , 然后要求机器人避开水杯、将目标物体拿到指定位置 。”
文章图片
文章图片
图|机械臂避障示意图 。(a)机械臂原本的移动路径;(b)机械臂完成更难任务时的移动路径;(c、d)患者使用控制面板上下左右操纵机械臂
然而 , 这还远远不够 。
因为起初 , 机器人会自动选择将物体移到较远的地方 , 从而清理出一条对某些障碍物来说较宽的路径 。但问题在于 , 这条路径对其他大点的物体来说不够宽 , 而且有时移动的距离也不够远 。
那么 , 能不能在患者的脑海与机器系统之间建立某种连接 , 来真正实现“意念控制”以达到更完美的避障效果呢?
要实现“意念控制” , 首先需要设计出一种算法 , 该算法可以完全根据患者脑海中的想法来调整机器人的各种运动 。于是 , 工程师们为患者戴上配有电极的头罩 , 该头罩可以对患者的大脑活动进行脑电图(EEG)扫描 , 一旦出现异常的电信号 , 就会对机器人的行动产生影响 。
- 「长文综述」康红普院士:无煤柱开采围岩控制技术及应用
- 炉石传说贫瘠之地的锤炼控制牧卡组怎么搭(炉石传说贫瘠之地的锤炼控制牧最强卡组搭配方法分享)
- 炉石传说贫瘠之地术士卡组怎么搭配(贫瘠之地的锤炼控制术卡组搭配推荐)
- 科技冬奥:“冰丝带”冰面温差最终控制在0.5度以内
- 小米12音量单独控制怎么弄(小米12音量单独控制设置操作步骤)
- 怎么用手机QQ远程控制电脑(手机QQ远程控制电脑操作流程)
- 智能控制、EG 2.0,骑新日GF6购置年货是一种什么体验?
- 告别不当操纵 互联网算法推荐“戴紧箍”
- 魔渊之刃控制流玩法
- 中国发布丨四部门:算法推荐服务提供者不得操纵榜单、影响网络舆论