机器人的“触觉”是怎么回事?( 四 )
最后再来看看东京大学的研究人员成功让双臂机器人剥出完整香蕉这件事 。想必大家都清楚 , 人类幅度越小的动作 , 机器人复现的难度越高 , 对于机械结构的精密程度要求也越高 , 无论是角度、力道等 , 都是对机械臂编程操作的一大考验 。
路透社发布信息称 , 东京大学信息学院的ISI实验室日前发布了一则视频 , 视频中所展示的双臂机器人可以在大约三分钟的时间内完整的剥掉一根香蕉的香蕉皮而不伤害果肉 。虽然成功率只有57% , 但是对于机器人进行“精密操作”的研究无疑意义重大 。
该研发团队的成员HeecheolKim、YoshiyukiOhmura和YasuoKuniyoshi采用了“深度模拟学习”的方法去训练机器人 , 他们演示了数百次剥香蕉的动作 , 以生成足够的数据 , 来让机器人进行重复的学习 , 最终经过13个小时的训练后 , 机器人成功完成了“剥香蕉”的动作 。
文章图片
文章图片
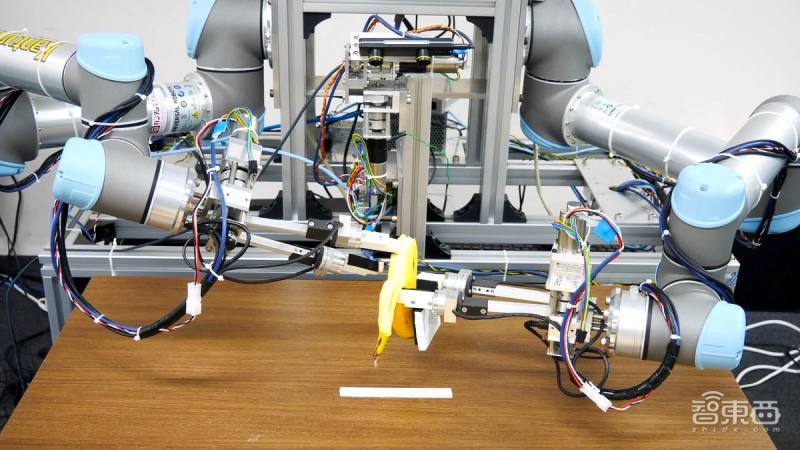
▲双臂机器人拿起香蕉并剥皮而不压扁里面的水果
在通过这种方法训练机器人学习更多能力的同时 , 团队中的Kuniyoshi认为 , 他们的这种训练方式能够有效的让机器人去学习更多精细的人类动作 , 例如重复的流水线工作 , 并以此来解决日本劳动力短缺的问题 。
可以说 , 无论是穿衣还是剥香蕉 , 如今机器人能够完成的工作变得更加精细和复杂 , 与之对应的是机器人在我们生活中的应用场景也在不断增加 。从照顾病人辐射到解决整个医疗行业的问题 , 从代替工人辐射到解决整个社会的生产力问题 , 这些技术的成功在未来很有可能会推动社会的进程 。成功让机器人完成触摸、穿衣和剥香蕉这些动作 , 也是技术积累的外在表现 。
结语:强化学习成关键 , “仿人”机器人技术迎来新突破
从上文中其实不难看出 , 反复的强化训练依然是目前机器人学习的主要途径 , 但是像“人造指尖”这种人体仿生学技术的加入 , 又为机器人的学习提供了全新的方式 。很显然 , “人造指尖”是目前机器人行业内独树一帜的存在 , 但是相对的 , 和传统的“模拟训练”相比 , “人造指尖”的机械结构要更精密 , 产品本身涉及的技术也更多更复杂 。
机器人不应该只是指令的载体 , 它更应该拥有和人脑比肩的智能 , 具备学习能力 , 懂得问题分析并可以执行精密的操作 。“人造指尖”、辅助穿衣和剥香蕉这三项技术的成功恰好对应了上述的三个条件 , 并且从侧面也反应了人工智能技术的推进 。对行业来说 , 今后机器人的训练方式 , 很可能会从原来“机械式地模仿” , 变成通过传感器加持下的“主动学习” , 一旦发生这样的改变 , 那机器人学习人类的进程将会大大加快 。
- 通过一粒月壤“看清”月球上的风化作用
- 创新防疫新方式!“反向扫码”既方便又精准
- 苹果自家app“黯然失色”
- qq音乐11.5.5.5升级版本发布“个性化歌单”
- 高端显卡价格“跳水”,等等党欢呼雀跃
- 米哈游:创始人直言“抄了别人的系统”
- 机器人商业化,还是得抄波士顿动力的作业
- 遥望网络公布“孔襄”身份信息
- 科技创新赢市场 金发科技实现“开门红”
- 助力油气增储上产 亚洲第一深水导管架“海基一号”海上安装就位