看四家技术代表如何演绎智能驾驶的“百家争鸣”!( 八 )

文章图片
文章图片
NIO Pilot 自动驾驶计算平台目前公布的有两个平台 , 那我们就分为 NT1.0 以及 NT2.0 两个部分讲 , 更助于大家理解 。1、 蔚来的求稳时代 : NT 1.0NT1.0 也是由一块 Mobileye- EyeQ4 以及 恩智浦-S32V 芯片集成 , 前者主要用于视觉感知处理 , 后者用于决策计算 , 这样的方案其实与彼时特斯拉、小鹏和 Mobileye 合作的方式类同 。大家肯定好奇为什么初期都是采用这样的合作模式?我们这里做一个补充 。其实是传统的合作形式大部分是依赖 Tier1 做集成 , 直接打包采用 。

文章图片
文章图片
Tier 1 对感知系统做集成(市场成熟) , 包括感知算法等 。而下游的规划、控制等决策模块则由车企自研 , 当然控制器也会交给第三方生产 。在 Mobileye 感知架构下 , 蔚来并没有与特斯拉一样急于求变、和小鹏一样大扩疆土自研 。反而是把更多的精力放在了只针对下游算法的研发 , 从基础的 L2 到领航辅助驾驶与泊车系统两大方向发力 。例如 NIO Pilot自动辅助驾驶下蔚来也相应升级了 NOP、视觉融合自动泊车等 。而这样的路线在实际后续的体验中出现“端倪” 。

文章图片
文章图片
从用户体验上看 , 我们发现NIO Pilot 例如在不跟车时通过红绿灯十字路口、混乱标线以及大曲率弯道时都会出现车道居中退出、无法识别、退出系统等 。另外在雨天、夜间光线不太好的时候 , NIO Pilot对于车道线的识别能力也会打折扣 。而蔚来基于高精地图的 NOP 体验中相比特斯拉 NOA 以及小鹏高速 NGP 上也有一定的差距 , 例如在感知、高静地图以及变道的规划与控制逻辑上都出现延迟、“我做不到”的结果 。

文章图片
文章图片
虽然我们看到基于 NT1.0 平台下的 NIO Pilot 在目前看依旧还在优化渐进中 , 但不可避免的问题是此时蔚来的更新迭代的效率以及自研板块的掌握已经逐步丢失优势 。显然在 NT1.0 平台下 , 蔚来需要作出改变 。摆在蔚来当前的有两个方向 , 一个是换一家供应商提供新的算法方案继续埋头干 , 另一个方案是建立起一套新的架构 , 自己干 。显然蔚来选择了后者 。2、 蔚来的跃进时代 :NT2.0一位业内原本神秘的感知算法“侠客”的加入打破了原有的平静 。这个人便是任少卿 。

文章图片
文章图片
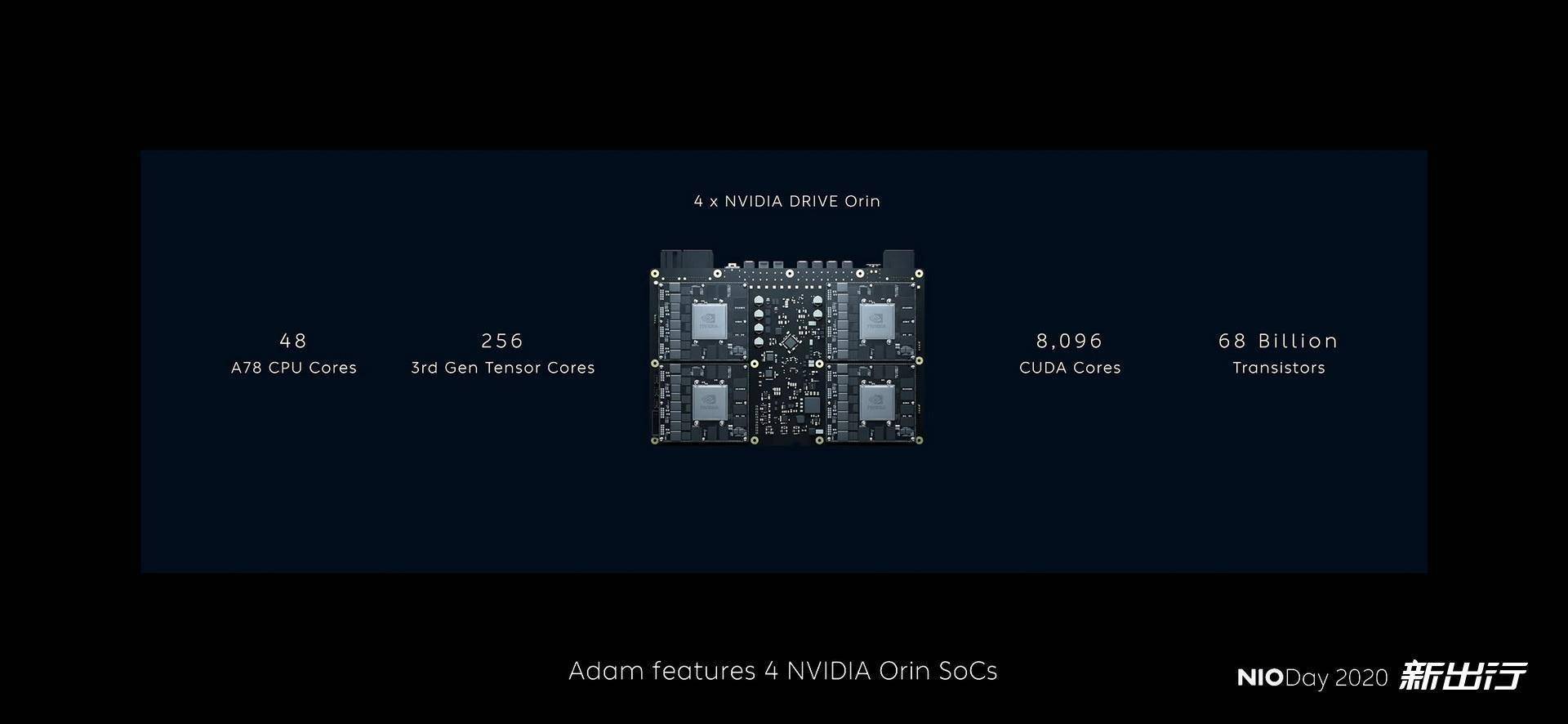
Momenta 本身是一家提供视觉感知算法、数据驱动、高精地图等在内的面相 L2/L3 以及 L4 方案的的出行公司 。这无疑释放了一个新的信号 。作为 Momenta 原研发总监的任少卿势 , 必要带队挺进蔚来感知、定位等算法研发 。我们又回归到最基础的架构的问题 , 作为后来者 , 前者有特斯拉、小鹏的车企的追赶 , 蔚来在新的架构便大胆押注 。蔚来在 NT2.0 平台上蔚来构建了 NAD 智能驾驶系统 , 采用了由 4 颗英伟达 Orin 构成的 NIO Adam 计算平台 ,其中除了 2 颗主控芯片 , 其余 1 颗作为冗余、1 颗作为训练以及群体智能专用芯片 。
- AI技术创新、模型创新、业务创新 全新服务模式助力金融机构数字化转型
- 年会礼品怎么选?不妨看看讯飞智能录音笔SR702、人体工学椅
- 百度地图升级智能手表导航 可查看公交地铁到站提醒
- 支付宝小程序收藏动态在哪看:具体的使用方法查看
- 克服天然缺陷!人工高效生物固氮技术潜力巨大
- 学历备案表怎么查询打印(学历备案表查看下载步骤一览)
- 怎么看腾讯看点历史记录(腾讯看点历史记录查询步骤详解)
- 抖音拉黑别人怎么不看对方视频(抖音拉黑好友具体步骤)
- 微信加别人的记录怎么查询(微信加别人的记录查看步骤解析)
- 抖音账单能不能删(抖音查看账单方法详解)