哈工程科研团队研发“深海医生”填补领域国产空白
本文转自:中国新闻网

文章图片
文章图片
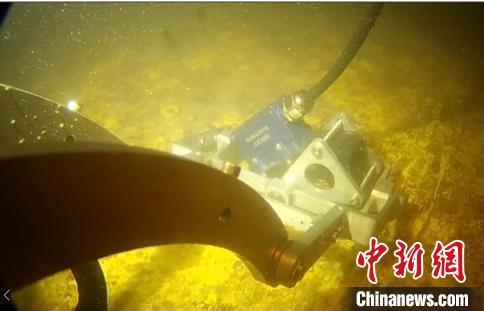
机器人进行管径检测 。哈工程提供
中新网哈尔滨7月5日电 (朱虹 采访人员 史轶夫)哈尔滨工程大学5日发布消息 , 该校研发中国国内首套海洋结构物水下无损检测机器人 , 并通过中国科技部组织的验收 , 实现中国国内水下无损检测的工程化示范应用 。该水下检测机器人可用于水下500米 , 完成各类海洋结构物的水下无损检测 , 填补了该领域的国产空白 。
海洋钻井、采油平台、海上风电塔桩等海洋装备大都采用钢结构桁架式结构 , 钢管对接、相贯线焊缝质量直接关系到结构安全 。而受到风浪水流冲击和长年累月海水侵蚀等因素作用 , 结构物会形成裂纹 , 为了避免构件断裂 , 影响海洋装备的运营安全 , 就需要进行周期性的焊缝检测 , 提前发现潜在安全隐患 。

文章图片
文章图片
机器人下水操控检测 。哈工程提供
“据不完全统计 , 我国海上风电塔有4300个 , 但能完成60米以下的专业水下结构物检测人员却不到200人 。作业水域较深时 , 人工下水检测过于危险 , 而且成本过高 , 并且这种方法许多因素取决于探伤人员的经验和技术 , 国外已经研制了一系列的水下检测机器人 , 然而国内在该领域仍处于起步阶段 。”面对这一痛点 , 哈尔滨工程大学船舶工程学院教授王刚 , 带领学生们在5年前开展了“深海医生”——水下检测机器人的研发 。
水下作业不同于陆地 , 不仅面临水深的影响 , 而且存在扰流复杂 , 如何保证检测过程中机器人和探头的稳定 , 是极具挑战性难题 。团队通过多年攻关 , 相继突破了扰流复杂吸附难、海洋结构物管径差异大、节点焊缝结构复杂等难题 。
在水下复杂扰流干扰的情况下 , 保证机器人的稳定吸附与灵活运动是一大挑战 。对此 , 研究团队设计了一套变磁力吸附系统 , 通过流速计感知检测机器人的流场情况 , 进而实时调整吸附力大小 , 保证检测过程中既能吸附牢靠又可灵活运动 。
文章图片
文章图片
机器人水下视角 。哈工程提供
去年 , 团队携带机器人完成了中国国内的首次风电塔桩水下机器人无损检测示范应用 。海洋结构物水下机器人检测 , 不但避免了人工潜水检测的人员安全风险 , 还能提高检测效率降低运维成本 , 有利于海洋各类资源的高效开发 , 为中国的能源安全提供强有力的保障 。
【哈工程科研团队研发“深海医生”填补领域国产空白】今后 , 团队还将继续改善水下检测机器人环境感知和智能决策能力 , 实现在复杂环境中对复杂焊缝的精确跟踪 , 为中国水下机器人自主环境感知与作业技术研究应用奠定基础 。
- 青岛大学环境科学与工程学院研制出高效去除甲醛催化剂
- 净化工程之净化车间洁净度的要求
- 「几何伙伴」获国际自动机工程师学会战略投资
- 前所未有!NASA哈勃太空望远镜在星际介质中做出重大发现
- 深耕半导体产业链和生物科技!落户宝山的这家企业二期工程项目封顶
- 天行健课堂: IE工业工程的工作研究包含哪些内容?
- 关于举办工业工程(IE)培训班的通知
- 轻量化智慧工地,让建设工程装上“大脑”
- 中信工程公司致力研发建筑信息模型软件——智能建造步入“云端”
- 哈利波特魔法觉醒醒禁林调查八眼蜘蛛怎么打(禁林调查八眼蜘蛛打法攻略)