哈工程“水陆两栖机器人”可跑可游打破业界难题
本文转自:中国新闻网
中新网哈尔滨7月9日电 (朱虹 采访人员 史轶夫)凭借足浆可变型关节和多模态驱动 , 机器人可在沙滩和水下智能切换奔跑模式和游动模式 , 完美解决了机器人在浅滩环境中敏捷游动和快速奔跑的业界难题 。这就是哈尔滨工程大学王刚副教授科研团队的最新研究成果——足桨式多模态水陆两栖机器人 。
哈尔滨工程大学9日发布消息 , 机器人领域国际顶级期刊《IEEE机器人学汇刊》(IEEE Transactions on Robotics)在线发表了这一科研成果(《Design and Optimization of a Multimode Amphibious Robot With Propeller-leg》) 。
文章图片
文章图片
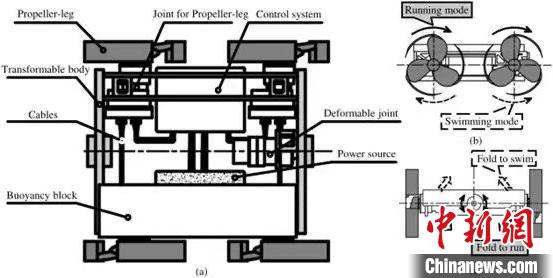
机器人的主要组成部分及运动模态切换方式介绍 。哈工程提供
两栖机器人的研究一直是机器人领域的热点之一 , 为了在海陆两种不同的介质中运动 , 大部分两栖机器人既有轮子又有螺旋桨 , 但由于环境介质密度相差巨大 , 尤其在连接海洋和陆地的浅滩 , 浪流扰动剧烈 , 地面干湿颗粒力学特性存在很大不同 , 这样的构型不利于机器人敏捷运动 。
而王刚团队提出了一种足桨式多模态水陆两栖机器人方案 , 为两栖机器人方案设计提供一种新的思路 。
文章图片
文章图片
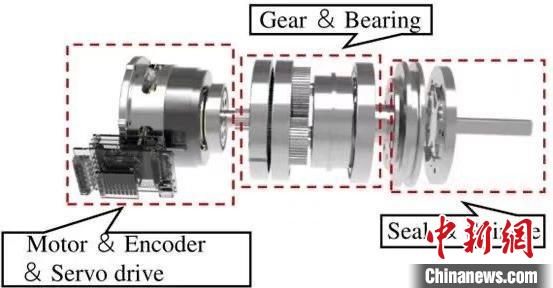
机器人模块化驱动关节示意图 。哈工程提供
通过推进装置的独特构型和参数优化方法 , 将足桨自身的多模式推进能力与机体的变型能力相结合 , 实现机器人在两栖环境下的运动模态切换 , 降低机器人系统的复杂程度 , 同时满足水中、陆上两种完全不同环境下对于敏捷运动的需求 , 解决传统方法将爬游功能叠加造成的运动性能不敏捷、作业效率低的难题 。

文章图片
文章图片
机器人在水中游动 。哈工程提供
机器人由可变形机体框架、变型驱动关节、控制舱、电池仓、足桨驱动装置组成 。在奔跑模式下 , 机体在变型驱动关节的驱动下展平 , 足桨驱动关节以低速模式驱动足桨 , 机器人依靠足部的推进能力在海底或沙滩奔跑;在游动模式下 , 机体在变型驱动关节的驱动下折叠 , 足桨驱动关节以高速模式驱动足桨 , 机器人依靠桨的推进能力在水面、水中游动 。

文章图片
文章图片
机器人在沙滩奔跑 。哈工程提供
国际上 , 首次实现机器人既能在沙滩、海底高速奔跑 , 也能在水中敏捷游动 。
【哈工程“水陆两栖机器人”可跑可游打破业界难题】未来 , 团队将针对机器人在两栖环境运动过程中的基础力学理论继续深入研究 , 为提高机器人的智能化水平努力 。
- 中国工程院邬贺铨院士:5g并没有比4g好用到哪去
- 中建一局二公司机电工程事业部开展2021届毕业生见习期答辩暨职业生涯规划大赛
- 中南建筑科技成果荣获工程建设科学技术进步奖二等奖
- 哈工程科研团队研发“深海医生”填补领域国产空白
- 青岛大学环境科学与工程学院研制出高效去除甲醛催化剂
- 净化工程之净化车间洁净度的要求
- 「几何伙伴」获国际自动机工程师学会战略投资
- 前所未有!NASA哈勃太空望远镜在星际介质中做出重大发现
- 深耕半导体产业链和生物科技!落户宝山的这家企业二期工程项目封顶
- 天行健课堂: IE工业工程的工作研究包含哪些内容?