航天员“抡手臂”就能转身,没胳膊的卫星咋办?( 二 )
办法总比困难多 , 科学家们很快就想出了双自旋稳定这种姿态控制方式 。人体的限制让我们没法上半身和下半身分开转 , 但卫星是人造的嘛 , 我们可以把卫星变成“上下半身分离的” , 这样问题不就解决了?
卫星被分为平台和转子两个部分 , 两者之间通过轴承连接 。需要定向的载荷被放置在平台上 , 而卫星的其他辅助系统则放在转子中 。工作时 , 转子自身是旋转的 , 而平台则通过电机进行反向转动 , 由此实现消旋 。这种姿控方式一般在通信卫星上比较常见 , 卫星搭载的通讯天线可以通过双自旋稳定实现对地定向 。
文章图片
文章图片
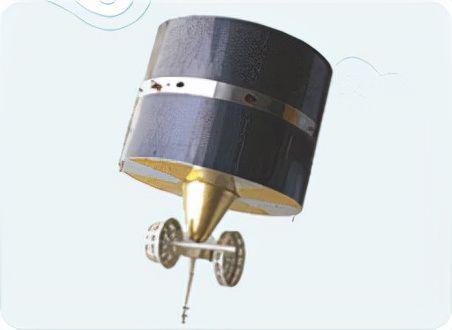
△风云二号卫星采用的是双自旋稳定(图片来源:国家卫星气象中心)
双自旋稳定不是长久之计 , 还是得靠“抡手臂”
虽然双自旋稳定很好使 , 但时间久了它的弊端也就暴露出来了 。由于平台相对较小 , 可安装的载荷也较少 。除此以外 , 采用双自旋稳定的卫星 , 其太阳能电池只能贴在卫星表面安装 , 太阳能利用效率低 , 卫星功率低 。看来这个“转身”方法并不是最优解 , 于是科学家们又想出了新点子 。
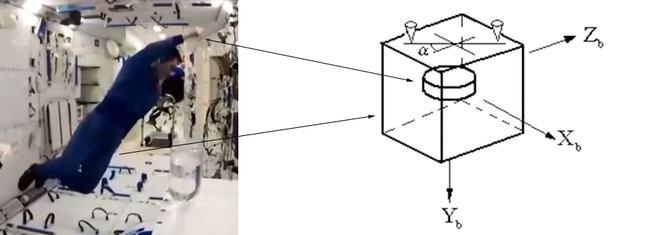
和抡手臂同理 , 我们只需要一个能转起来提供角动量的部件代替原来庞大的转子 , 就可以让平台作为主体部分受控旋转 。这就是固定偏置动量三轴稳定姿控的原理 。采用这种姿控方式的卫星 , 其内部安装有一个偏置动量轮 。工作时 , 动量轮保持旋转 , “持有”一定角动量 , 卫星平台可根据需要与动量轮交换角动量 , 就像航天员调整抡手臂的速度以调整自己身体的转速一样 , 实现对地球或其他天体的定向和其他姿控要求 。
文章图片
文章图片
△动量轮的作用和手臂类似 , 通过和主体交换角动量达到控制姿态的目的 , 只不过手臂在体外 , 而动量轮可以收到卫星平台体内(图片来源:作者结合视频截图制作)
这个方法还能进一步扩展:我们可以增加动量轮的数量并将它们合理布局 , 使卫星在任意三维方向上产生“自由”大小的角动量以供旋转定向和姿控 。这种方法大大提升了控制精度 , 卫星也变得更加灵活 , 因此被广泛用于各种卫星的姿控分系统 。

文章图片
文章图片
△ATS-6卫星是第一颗使用“三轴稳定”姿控方式的卫星(图片来源:NASA)
在太空微重力环境下 , 很多在地面上看起来习以为常的事情都会呈现出不一样的面貌 。哪怕是“转身”这样看似不起眼的小事 , 也蕴含着和卫星姿控相关的基本原理 。
相信太空中还有很多隐藏在“习以为常”外表下的未知 , 等待着我们去发现和探索 。
致谢 :
感谢中国科学院国家空间科学中心复杂航天系统电子信息技术院重点实验室高东副研究员对本文的科学审核 。
参考文献:
[1] 包妙琴. 我国自旋稳定通信卫星四种发展方案的比较[J]. 中国空间科学技术, 1992(02): 30–37.
[2] 李卿. 中国静止气象卫星进展[J]. 航天返回与遥感, 2001(01): 13–19.
[3] 吕建婷, 马广富, 宋斌. 偏置动量轮控卫星姿态控制[J]. 控制工程, 2007(06): 569-571+575.
[4] 章仁为. 卫星轨道姿态动力学与控制[M]. 1 版. 北京: 北京航空航天大学出版社, 1998.
- “5G+AI”新应用来了!5G秘书帮你轻松搞定接电话、查天气
- 加强产业融合 赋能低碳发展 海尔卡奥斯智慧能源与“青碳行”签署战略合作协议
- 人类与AI如何共处?诺奖科学家、将棋天才、“低欲望社会”提出者的不同解答
- 郎酒将拓宽红花郎品牌战略阵地 打造红花郎“中国节”IP
- 冬奥在即!“AI教练”、滑雪机器人,沪上高校科技助力“冰雪精灵”!
- 线上新书发布!云上带你了解有关“冬奥”的那些事儿
- 长安马自达cx-5实车图曝光网友吐槽“没诚意”
- 这个“CT室”,可以到处跑
- 长安福特蒙迪欧在中国市场的“全球化”
- “会省钱”成了当代青年的阶层分界线