机器鱼尾中的优雅数学
如果我们希望水下航行器可以在广阔的海洋中快速行驶 , 又可以在遇到珊瑚礁时减速运行 , 该怎么办?
【机器鱼尾中的优雅数学】美国弗吉尼亚大学工程与应用科学学院的研究人员发现了实现此类多速任务的关键策略——推动机器人在水中前进的部件应该有多硬 。鱼很可能通过实时调整它们尾部的刚度来解决这个问题 。研究团队通过结合流体动力学和生物力学 , 推导出模型从而解决了这个问题 。研究人员说:“令人惊讶的是 , 从所有的数学计算中得出了一个简单的结果:刚度应该和游泳速度的平方相关 。”
文章图片
文章图片
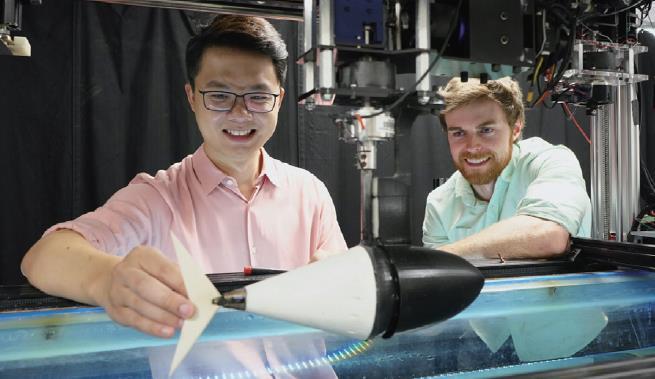
為了测试理论 , 研究团队构建了使用可编程的人造肌腱在水道中游泳的鱼形机器人
来源:北京邮电大学出版
- 冬奥在即!“AI教练”、滑雪机器人,沪上高校科技助力“冰雪精灵”!
- safari浏览器中的indexeddb漏洞
- 打疫苗不靠人?不用针?智能无针机器人有望“代劳”
- 身姿矫健!上海交大自主研发滑雪机器人:有六只脚,能灵活避障
- 酷炫!南海教师花费七年心血,研发出独家魔方机器人!
- 小米机器狗“铁蛋”升级,支持app快连
- “螺旋桨”机器人
- 污水厂的处理流程中的工艺细节管理(十四)-生化池的运行细节5
- 谷小御解放家庭主妇双手——智能炒菜机器人
- 助力“科技冬奥”,上海交大自主研发六足滑雪机器人惊艳亮相