PID 控制器如何工作?- 结构和调整方法 - 广州同创芯电子有限公司( 二 )
PI 控制器响应
在上图中,随着 I 控制器增益的减小,稳态误差也继续减小 。在大多数情况下,PI 控制器特别适用于不需要高速响应的情况 。
在使用 PI 控制器时,I 控制器的输出被限制在一定范围内,以克服积分结束条件,即使在零误差状态下,由于工厂的非线性,积分输出也会继续增加 。
D-控制器
I-controller 没有能力预测错误的未来行为 。因此,一旦更改设定值,它就会正常反应 。D-controller 通过预测错误的未来行为来克服这个问题 。它的输出取决于误差相对于时间的变化率,乘以导数常数 。它为输出提供了启动,从而增加了系统响应 。
文章图片
文章图片
PID控制器
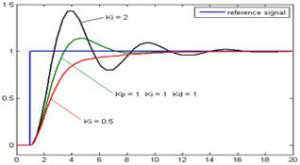
在上图中 D 的响应中,控制器比 PI 控制器更多,并且输出的稳定时间也减少了 。它通过补偿 I 控制器引起的相位滞后来提高系统的稳定性 。增加微分增益会增加响应速度 。
PID 控制器响应
所以最后我们观察到,通过组合这三个控制器,我们可以获得系统所需的响应 。不同的制造商设计不同的PID算法 。
PID控制器的类型
PID 控制器分为开/关型、比例型和标准型控制器三种类型 。这些控制器都是基于控制系统使用的,用户可以使用控制器来调节方法 。
开/关控制
开关控制方法是用于温度控制的最简单类型的设备 。设备输出可以通过无中心状态打开/关闭 。一旦温度超过固定点,该控制器将打开输出 。限位控制器是一种使用自锁继电器的特殊开/关控制器 。该继电器手动复位并用于在达到一定温度后关闭方法 。
比例控制
这种控制器设计用于去除通过开/关控制连接的循环 。一旦温度达到固定点,该 PID 控制器将减少提供给加热器的正常功率 。
该控制器具有一个功能来控制加热器,使其不会超过固定点,但它将达到固定点以保持稳定的温度 。这种比例行为可以通过在小时间段内打开和关闭输出来实现 。此时间比例将改变从 ON 时间到 OFF 时间的比率以控制温度 。
标准型PID控制器
这种PID控制器将通过积分和微分控制合并比例控制,以自动辅助单元补偿系统内的修改 。这些修改、积分和导数以基于时间的单位表示 。
这些控制器也相应地通过它们的倒数、RATE 和 RESET 来引用 。PID 的条款必须单独调整,否则会根据试验和错误调整到特定系统 。这些控制器将提供三种控制器中最精确和稳定的控制 。
实时 PID 控制器
目前,市场上有多种PID控制器可供选择 。这些控制器用于压力、温度、液位和流量等工业控制要求 。一旦通过 PID 控制这些参数,选择包括使用单独的 PID 控制器或 PLC 。这些单独的控制器用于需要检查一个或两个回路的地方,以及在通过较大系统进入权复杂的条件下进行控制的地方 。
这些控制设备为单回路和双回路控制提供了不同的选择 。独立型 PID 控制器提供多个定点配置以产生自主的多个警报 。这些独立控制器主要包括霍尼韦尔的 PID 控制器、横河的温度控制器、欧米茄、西门子的自动调谐控制器和 ABB 控制器 。
在大多数工业控制应用中,PLC 与 PID 控制器一样使用 PID 块的排列可以在 PAC 或 PLC 内完成,从而为精确的 PLC 控制提供更好的选择 。与单独的控制器相比,这些控制器更智能且功能更强大 。每个 PLC 在软件编程中都包含 PID 块 。
调整方法
在 PID 控制器工作之前,必须对其进行调整以适应要控制的过程的动态 。设计人员为 P、I 和 D 项提供了默认值,这些值无法提供所需的性能,有时会导致不稳定和控制性能缓慢 。开发了不同类型的调整方法来调整 PID 控制器,并且需要操作员非常注意选择比例、积分和微分增益的最佳值 。其中一些在下面给出 。
- 企业思想政治建设如何实现数字赋能
- 利用智慧数字经营,如何实现线上线下的业绩增长
- iphone如何用蓝牙传照片给安卓(苹果手机和安卓用用蓝牙传照片方法详解)
- 王者荣耀夏洛特永昼特效如何(王者荣耀夏洛特新皮肤永昼效果一览)
- 抖音小店什么类目好做,新手又该如何选择类目呢?这个问题从抖店
- 如何屏蔽某些文件目录在win11中出现?
- 如何提高自己的学习效率?
- 如何足不出户线上递诉讼材料?
- 钉钉请假如何设置审批人(钉钉请假审批人设置步骤详解)
- 明日之后负重芯片如何制作(明日之后负重芯片配方内容分析)