PID 控制器如何工作?- 结构和调整方法 - 广州同创芯电子有限公司
本文转自:北京晚报
什么是PID控制器?
PID 一词代表比例积分微分,它是一种用于控制工业应用中不同过程变量(如压力、流量、温度和速度)的设备 。在该控制器中,控制回路反馈装置用于调节所有过程变量 。
这种类型的控制用于在目标位置的方向上驱动系统,否则水平 。它几乎无处不在,用于温度控制,并用于科学过程、自动化和无数化学品 。在这个控制器中,闭环反馈用于保持方法的真实输出,如接近目标,否则尽可能在固定点输出 。在本文中,讨论了 PID 控制器设计,其中使用了 P、I 和 D 等控制模式 。
历史
PID 控制器的历史是,1911 年,第一个 PID 控制器由 Elmer Sperry 开发 。之后,TIC(Taylor Instrumental Company)在 1933 年实施了一个完全可调的前气动控制器 。几年后,控制工程师通过将末端重新调整为某个错误值直到误差不为零,从而消除了在比例控制器中发现的稳态误差 。
这种重新调整包括被称为比例积分控制器的误差 。此后,在 1940 年,第一个气动 PID 控制器通过微分作用开发,以减少超调问题 。
1942 年,Ziegler & Nichols 引入了整定规则,以便工程师发现和设置 PID 控制器的合适参数 。最后,自动 PID 控制器在 1950 年中期广泛应用于工业 。
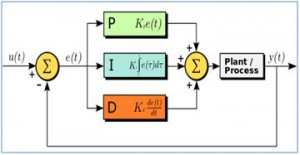
PID 控制器框图
像 PID 控制器这样的闭环系统包括反馈控制系统 。该系统使用固定点评估反馈变量以生成误差信号 。在此基础上,它会改变系统输出 。这个过程将一直持续到误差达到零,否则反馈变量的值将等于一个固定点 。
与 ON/OFF 型控制器相比,该控制器提供了良好的效果 。在 ON/OFF 型控制器中,只需两个条件即可管理系统 。一旦过程值低于固定点,它将打开 。同样,一旦该值高于固定值,它将关闭 。这种控制器的输出不稳定,会在定点区域频繁摆动 。但是,与 ON/OFF 型控制器相比,该控制器更加稳定和准确 。
文章图片
文章图片
PID控制器的工作
使用低成本的简单开关控制器,只有两种控制状态是可能的,如完全开启或完全关闭 。它用于有限的控制应用,其中这两种控制状态足以满足控制目标 。然而,这种控制的振荡性质限制了它的使用,因此它正在被 PID 控制器所取代 。
PID 控制器通过闭环操作保持输出,使得过程变量和设定值/期望输出之间的误差为零 。PID 使用下面解释的三种基本控制行为 。
P-控制器
比例控制器或 P 控制器提供与电流误差 e (t) 成比例的输出 。它将期望值或设定值与实际值或反馈过程值进行比较 。产生的误差乘以比例常数得到输出 。如果误差值为零,则该控制器输出为零 。

文章图片
文章图片
P-控制器
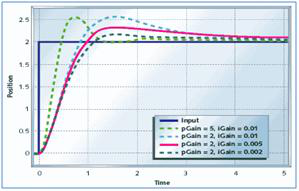
该控制器单独使用时需要偏置或手动复位 。这是因为它永远不会达到稳态条件 。它提供稳定的操作,但始终保持稳态误差 。当比例常数 Kc 增加时,响应速度会增加 。
P-控制器响应
控制器
由于 p 控制器的限制,在过程变量和设定值之间总是存在偏移,因此需要 I 控制器,它提供必要的动作来消除稳态误差 。它在一段时间内对误差进行积分,直到误差值达到零 。它将误差为零的值保存到最终控制装置 。
文章图片
文章图片
PI 控制器
当出现负误差时,积分控制会降低其输出 。它限制了响应速度,影响了系统的稳定性 。通过减小积分增益 Ki 可以提高响应速度 。
- 企业思想政治建设如何实现数字赋能
- 利用智慧数字经营,如何实现线上线下的业绩增长
- iphone如何用蓝牙传照片给安卓(苹果手机和安卓用用蓝牙传照片方法详解)
- 王者荣耀夏洛特永昼特效如何(王者荣耀夏洛特新皮肤永昼效果一览)
- 抖音小店什么类目好做,新手又该如何选择类目呢?这个问题从抖店
- 如何屏蔽某些文件目录在win11中出现?
- 如何提高自己的学习效率?
- 如何足不出户线上递诉讼材料?
- 钉钉请假如何设置审批人(钉钉请假审批人设置步骤详解)
- 明日之后负重芯片如何制作(明日之后负重芯片配方内容分析)