PID 控制器如何工作?- 结构和调整方法 - 广州同创芯电子有限公司( 三 )
PID 控制器用于大多数工业应用,但应该知道该控制器的设置以正确调整它以生成首选输出 。在这里,调整只不过是通过设置最佳比例增益、积分和微分因子从控制器接收理想响应的过程 。
PID 控制器的期望输出可以通过调节控制器来获得 。有不同的技术可用于从控制器获得所需的输出,例如试错法、Zeigler-Nichols 和过程反应曲线 。最常用的方法是反复试验、Zeigler-Nichols 等 。
试错法:这是一种简单的 PID 控制器整定方法 。当系统或控制器工作时,我们可以调整控制器 。在这种方法中,首先,我们必须将 Ki 和 Kd 值设置为零并增加比例项 (Kp) 直到系统达到振荡行为 。一旦开始振荡,调整 Ki(积分项)使振荡停止,最后调整 D 以获得快速响应 。
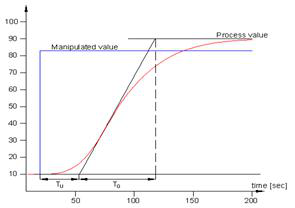
过程反应曲线技术:它是一种开环调整技术 。当阶跃输入应用于系统时,它会产生响应 。最初,我们必须手动向系统应用一些控制输出,并且必须记录响应曲线 。
之后,我们需要计算曲线的斜率、死区时间、上升时间,最后将这些值代入 P、I 和 D 方程,得到 PID 项的增益值 。
文章图片
文章图片
过程反应曲线
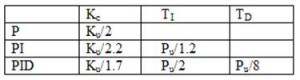
Zeigler-Nichols 方法: Zeigler-Nichols 提出了用于调整 PID 控制器的闭环方法 。这些是连续循环法和阻尼振荡法 。两种方法的程序相同,但振荡行为不同 。在此,首先,我们必须将 p 控制器常数 Kp 设置为特定值,而 Ki 和 Kd 值为零 。增加比例增益,直到系统以恒定幅度振荡 。
系统产生恒定振荡的增益称为极限增益(Ku),振荡周期称为极限周期(Pc) 。一旦达到,我们可以通过 Zeigler-Nichols 表在 PID 控制器中输入 P、I 和 D 的值,这取决于所使用的控制器,如 P、PI 或 PID,如下所示 。
文章图片
文章图片
齐格勒-尼科尔斯表
PID控制器结构
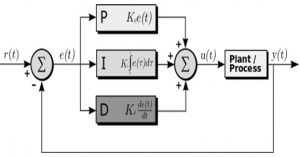
PID控制器由三项组成,即比例控制、积分控制和微分控制 。这三个控制器的组合操作给出了过程控制的控制策略 。PID 控制器操纵过程变量,如压力、速度、温度、流量等 。一些应用在级联网络中使用 PID 控制器,其中两个或多个 PID 用于实现控制 。
文章图片
文章图片
PID控制器的结构
上图显示了 PID 控制器的结构 。它由一个 PID 块组成,该块将其输出提供给进程块 。过程/工厂由最终控制设备组成,如执行器、控制阀和其他控制设备,以控制工业/工厂的各种过程 。
将来自过程工厂的反馈信号与设定点或参考信号 u(t) 进行比较,并将相应的误差信号 e(t) 馈送到 PID 算法 。根据算法中的比例、积分和微分控制计算,控制器产生组合响应或受控输出,应用于工厂控制设备 。
所有控制应用程序都不需要所有三个控制元素 。PI 和 PD 控制等组合在实际应用中经常使用 。
应用
PID 控制器应用包括以下内容 。
最好的 PID 控制器应用是温度控制,其中控制器使用温度传感器的输入,其输出可以与风扇或加热器等控制元件相关联 。通常,该控制器只是温度控制系统中的一个元件 。在选择正确的控制器时,必须检查和考虑整个系统 。
炉温控制
通常,熔炉用于包括加热以及在极高温度下容纳大量原材料 。占用的材料通常包括一个巨大的质量 。因此,它需要大量的惯性,即使施加大量热量,材料的温度也不会迅速改变 。此功能可产生适度稳定的 PV 信号,并允许微分周期有效地纠正故障,而不会对 FCE 或 CO 进行极端更改 。
- 企业思想政治建设如何实现数字赋能
- 利用智慧数字经营,如何实现线上线下的业绩增长
- iphone如何用蓝牙传照片给安卓(苹果手机和安卓用用蓝牙传照片方法详解)
- 王者荣耀夏洛特永昼特效如何(王者荣耀夏洛特新皮肤永昼效果一览)
- 抖音小店什么类目好做,新手又该如何选择类目呢?这个问题从抖店
- 如何屏蔽某些文件目录在win11中出现?
- 如何提高自己的学习效率?
- 如何足不出户线上递诉讼材料?
- 钉钉请假如何设置审批人(钉钉请假审批人设置步骤详解)
- 明日之后负重芯片如何制作(明日之后负重芯片配方内容分析)