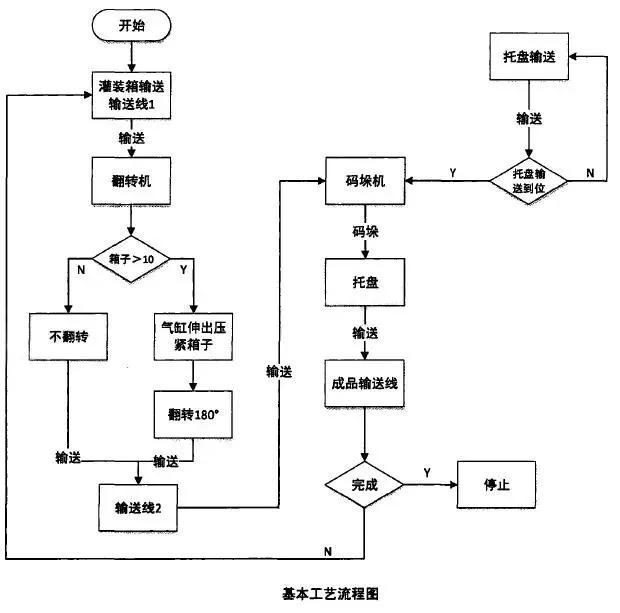
码垛机器人生产线整体工艺流程
码垛生产线整体工艺流程如下:成品箱→输送、翻转机→码垛机→成品输送:具体过程为成品经输送线1输送至翻转机 , (这里以24垛型为例 , 其垛型选择最底层的成品不需要翻转直接码放) , 因此前10个成品箱不进行翻转直接输送至输送线2 , 到夹爪下方 , 此时码垛机应己完成初始化复位 , 运行至初始位置 , 托盘拆垛机将托盘输送到位 , 夹爪运动至初始位置等待成品到位进行抓取箱子;箱子输送到位后 , 根据垛型进行2箱和3箱的抓取 , 并根据底层垛型进行码放 , 在完成前10个箱子的码垛之后 , 接下来的由输送线1输送过来的成品都需要通过翻转机进行1800翻转的后输送至输送线2 , 其中每次翻转箱子数为2 , 而后进行码垛直至达到所选垛型的层高和垛数 , 而后停止码垛 , 码垛机回初始位置等待下次码垛信号 , 而完成垛将通过成品输送线输出 , 基本流程如图所示:
文章图片
文章图片
【码垛机器人生产线整体工艺流程】将直角坐标型机器人和多关节型机器人进行对比 , 最终选用直角坐标型机器人作为完成码垛任务的机器人 。同时对自动码垛生产线的结构组成及其各机构所实现的功能进行了详细的描述 , 并对自动码垛生产线的工艺流程进行介绍 , 使大家对于码垛机整体结构有一个直观的认识 。
- 冬奥在即!“AI教练”、滑雪机器人,沪上高校科技助力“冰雪精灵”!
- 打疫苗不靠人?不用针?智能无针机器人有望“代劳”
- 身姿矫健!上海交大自主研发滑雪机器人:有六只脚,能灵活避障
- 酷炫!南海教师花费七年心血,研发出独家魔方机器人!
- “螺旋桨”机器人
- 谷小御解放家庭主妇双手——智能炒菜机器人
- 助力“科技冬奥”,上海交大自主研发六足滑雪机器人惊艳亮相
- 无针疫苗注射机器人正式公开原型机
- 摩尔庄园手游升级农具机器人怎么找(摩尔庄园手游R7机器人位置说明)
- 和机器人一起滑雪!六足滑雪机器人亮相助力科技冬奥